
本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
电子手册中的内容可能会在没有事先通知的情况下进行更新。因此,一些视频可能与电子手册中的内容有所不同。
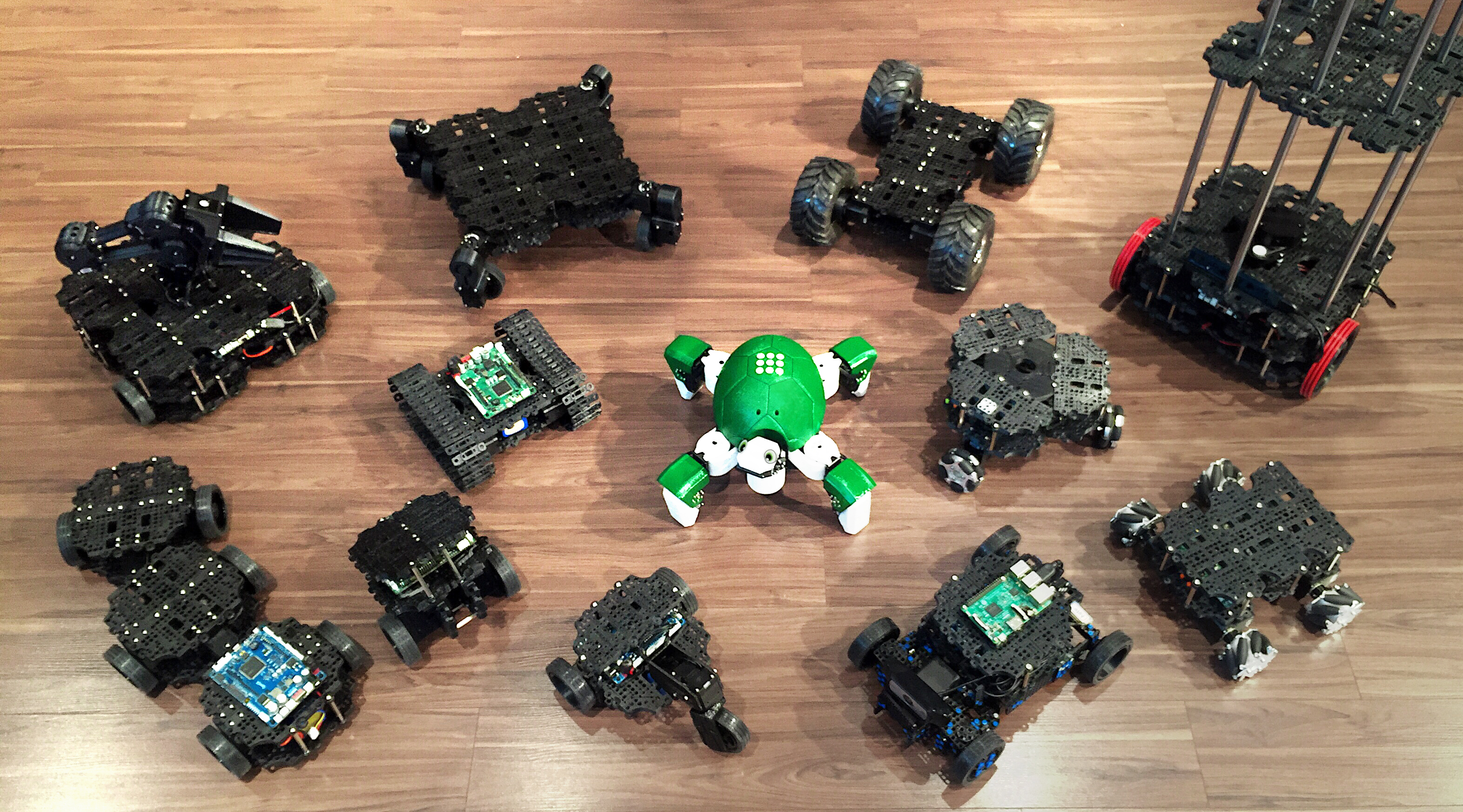
在视频中,请看TurtleBot3是如何通过一些额外的部件进行组装和重新组装的。waffle 是 TurtleBot3 组件中最大的部分,由于它有各种不同的螺栓和螺母孔,所以可以组装成各种尺寸和形状。
有了这个开放式的组件,就可以建造出具有各种特征的少量TurtleBot3朋友。你可以创造一个前所未有的全新机器人。在开放硬件的基础上创建各种机器人,并尝试新的Locomotion。
通知
感谢你对TurtleBot3 Friends的持续关注。
BOM中列出的产品,由第三方经销商销售,可能会在没有事先通知的情况下发生变化或停产。
在这种情况下,请参考3D建模文件来寻找兼容产品。
联系信息
如果你有关于TurtleBot3 Friends的问题,请通过以下电子邮件与我们联系。
| Single Item | Quantity | Set Item | Quantity | Purchase Links |
|---|---|---|---|---|
| XL430-W250-T (e-Manual) | 2 | XL430-W250-T | 2 | 小芽店铺 |
| ROBOT CABLE-X4P 240mm | 2 | ROBOT CABLE-X4P 240mm | 2 | 小芽店铺 |
| OpenCR1.0 (e-Manual) | 1 | OpenCR1.0 | 1 | 小芽店铺 |
| TB3 Waffle Plate-IPL-01 | 6 | TB3 Waffle Plate-IPL-01 | 1 | 小芽店铺 |
| TB3 PCB Support-IBB-01 | 4 | TB3 PCB Support-IBB-01 | 1 | 小芽店铺 |
| Rivet-Mg(n) | 4 | Rivet-Mg(n) | 4 | 小芽店铺 |
| TB3 Wheel/Tire | 2 | TB3 Wheel/Tire Set-ISW-01 | 1 | 小芽店铺 |
| PHS M3x8mm | 20 | None | None | Online Store |
| PHS M2.5x8mm | 4 | None | None | Online Store |
| PHS M2.5x12mm | 16 | None | None | Online Store |
| WB_M2x4mm | 8 | None | None | Online Store |
| WB_M2.5x20mm | 8 | None | None | Online Store |
| NUT_M2.5 | 4 | None | None | Online Store |
| NUT_M3 | 8 | None | None | Online Store |
| SB-S3-45 | 4 | None | None | Online Store |
| SB-S3-35 | 2 | None | None | Online Store |
| 3D printing parts(HV Converter) | 4 | None | None | Onshape |
获取源代码并结交朋友! 进入Arduino IDE上的
Examples→turtlebot3→turtlebot3_friends,获取OpenCR。
注意。我们随时欢迎对TurtleBot3 Friends项目的任何建议和想法。告诉我们你的创意TurtleBot3朋友。我们可以通过这个维基页面向世界介绍你的朋友 电子邮件:ost@robotis.com :)
11.1 TurtleBot3 拓展1: Car
注意。TurtleBot3 Friends的3D建模。汽车目前还不能使用。
类型:遥控车
特点: 约1:2的齿轮比,差速器齿轮想让汽车在E级方程式中发挥作用!
部件:两个DYNAMIXEL X 430系列(一个用于转向,一个用于驾驶),一个OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,6毫米塑料框架。
硬件:本例中使用的一些部件禁止在3D建模中共享。
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_car。视频:
11.2 TurtleBot3 拓展2: OpenManipulator
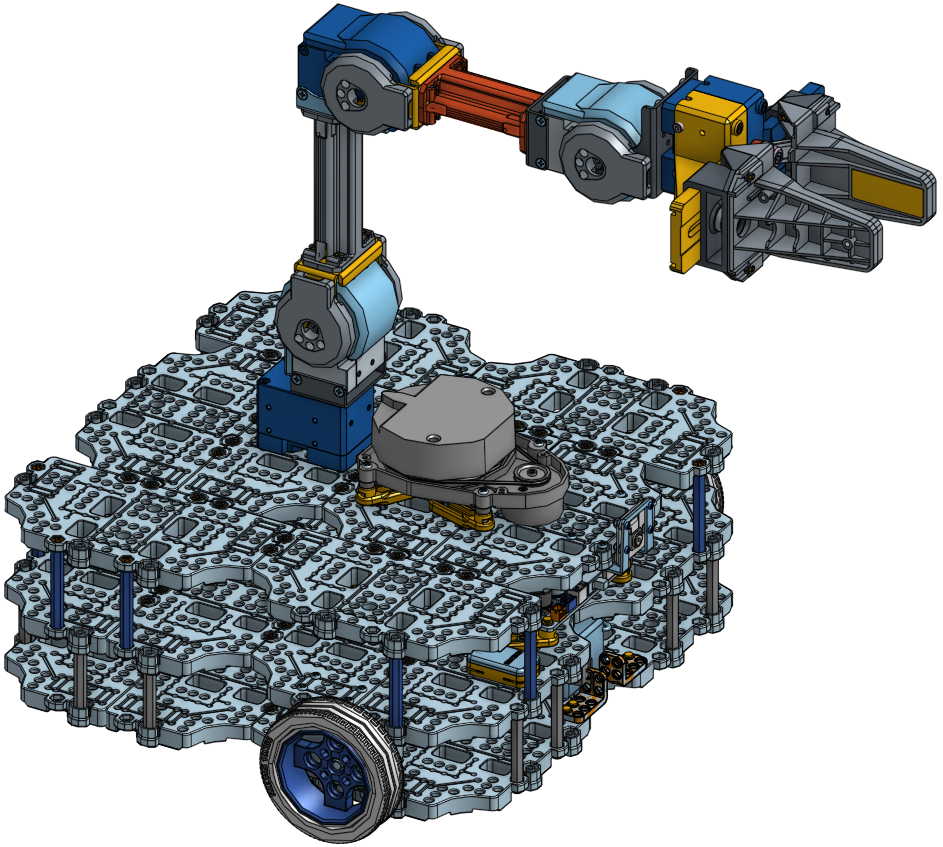
类型:机械手 4 DOF + 1 爪子
特点:与TurtleBot3 Waffle Pi兼容,它有线性抓手,用于取放。
组件:四个DYNAMIXEL X 430系列(四个用于关节,一个用于抓手),一个OpenCR1.0板,3D打印底盘。
BOM:请参考OpenManipulator的零件
TurtleBot3 Waffle Pi + OpenManipulator的硬件(Onshape, Thingiverse)
OpenManipulator的硬件(Onshape, Thingiverse)
软件 (我们正在准备OpenCR的例子)
视频:
11.3 TurtleBot3 拓展3: Segway

注意:
两个DYNAMIXEL X 430系列需要被设置为PWM模式。
滤波器库必须下载并包含在arduino IDE中。Github链接
类型: 赛格威机器人
特点: 通过应用PID控制器,只用两个DYNAMIXEL进行平衡。
部件: 两个DYNAMIXEL X 430系列(全部用于平衡),一个OpenCR1.0板,TurtleBot3底盘和电池,3D打印的底盘。
硬件(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_segway视频:
11.4 TurtleBot3 拓展4: Conveyor
类型:四轮平行翻译车
特点:4个关节和4个轮子将成为交通社会的未来技术,克服了耗油的机械。
部件:八个DYNAMIXEL X 430系列(四个用于转向,四个用于驾驶),一个OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印底盘。
硬件:(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_conveyor。视频:
11.5 TurtleBot3 拓展5: Monster
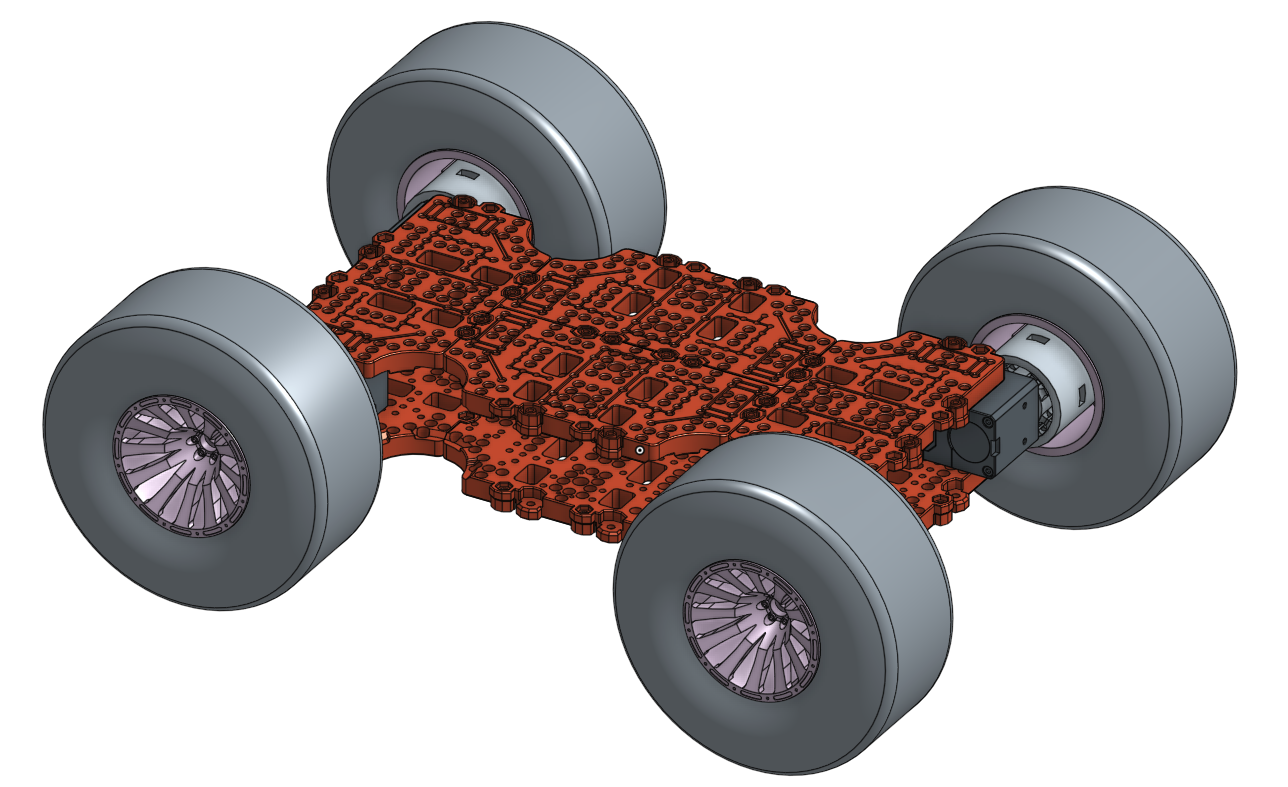
类型:四轮驱动汽车
特点:4个大轮子让它在崎岖的地形或甚至是大的海拔差异中都很强大。
部件:四个DYNAMIXEL X 430系列(全部用于驾驶),一块OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印底盘。
硬件:(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_monster。视频:
11.6 TurtleBot3 拓展6: Tank
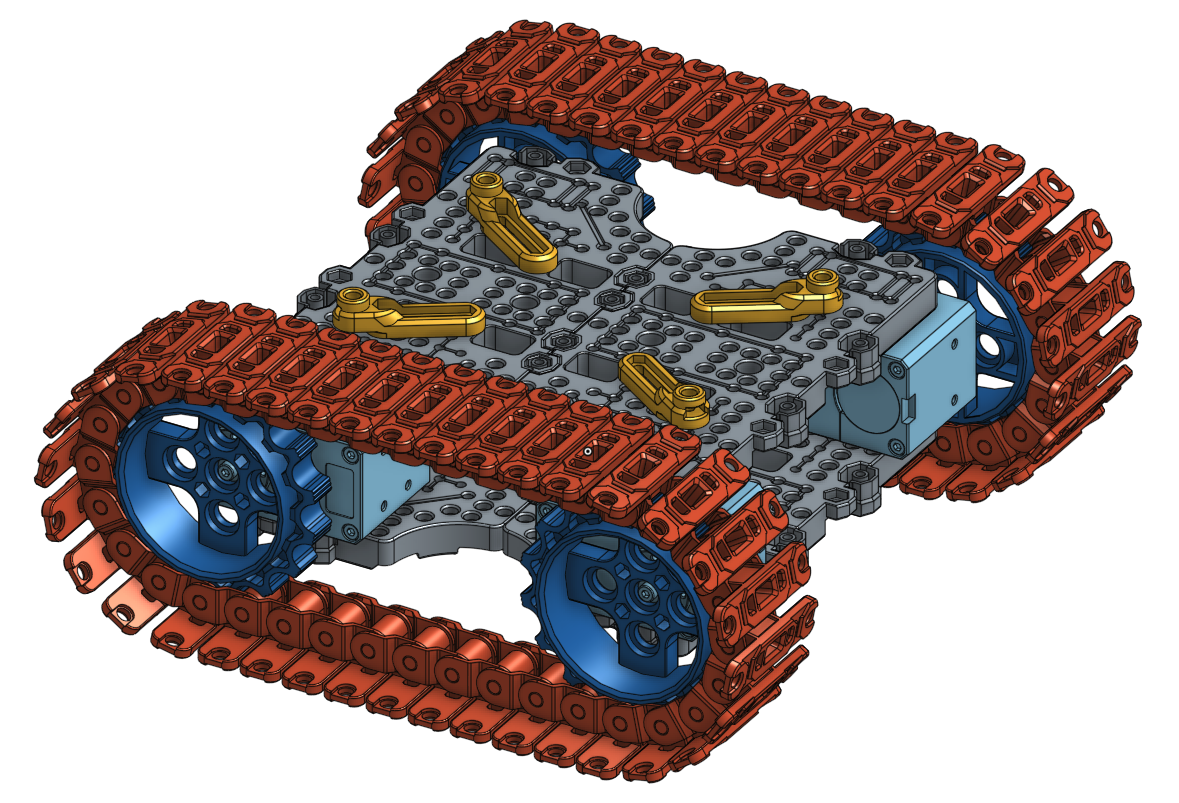
类型:卡特彼勒
特点:卡特彼勒单元连接并装配在链轮上,使其在崎岖不平的地形上很强大。
部件: 两个DYNAMIXEL X 430系列(全部用于驱动),一块OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100远程控制器,TurtleBot3底盘和电池,卡特彼勒单元,3D打印底盘。
硬件:(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_tank。视频:
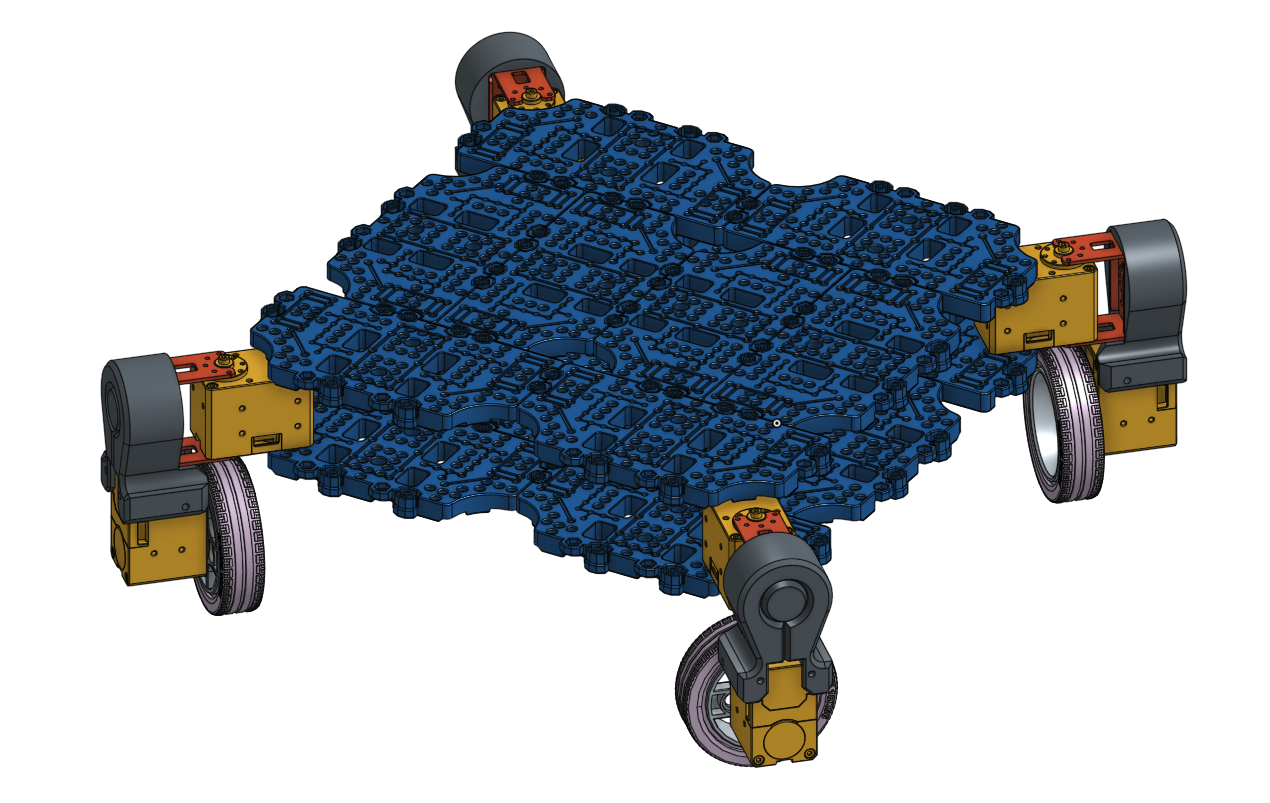
11.7 TurtleBot3 拓展7: Omni
类型:全能轮
特点:全能型轮子在圆周上有额外的圆盘,使其可以横向驱动。
部件: 三个DYNAMIXEL X 430系列(全部用于驱动),一个OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印的底盘。
硬件(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_omni。视频:
11.8 TurtleBot3 拓展8: Mecanum
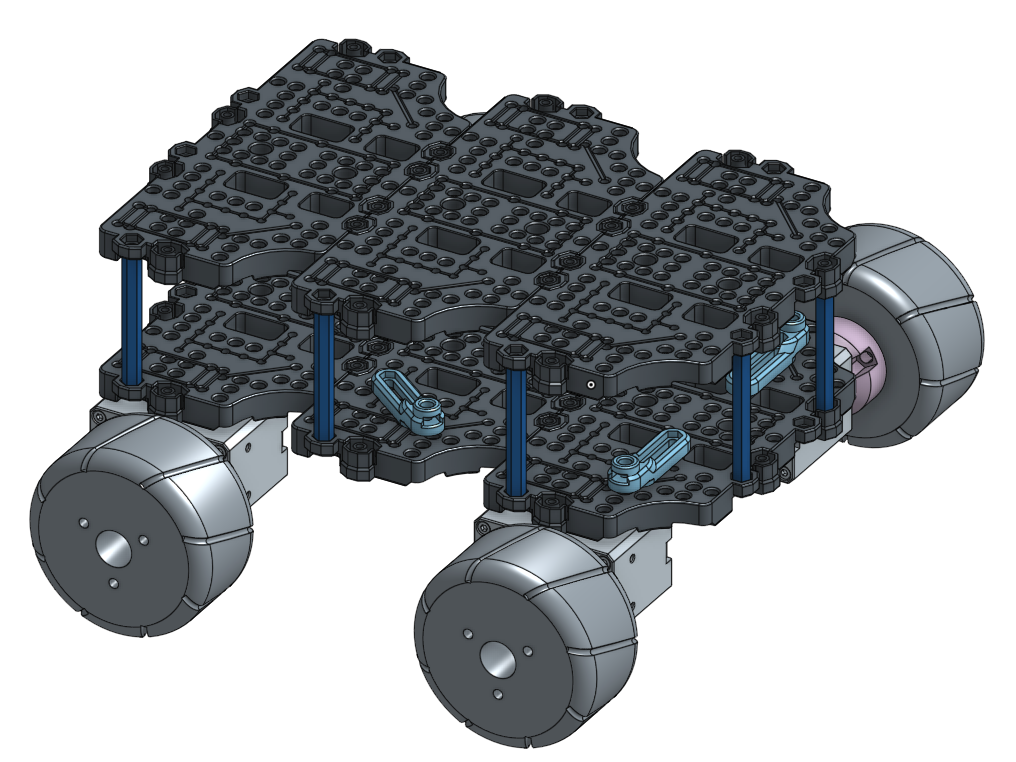
- 类型:麦格纳姆轮
- 特点:Mecanum轮毂在圆周上有额外的圆盘,使其可以横向驱动。
- 部件:四个DYNAMIXEL X 430系列(全部用于驱动),一块OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印底盘。
- BOM
- 硬件:(Onshape, Thingiverse)
- 软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_mechanum - 视频: 在上面的视频TurtleBot3 Friends: Omni中看到。
11.9 TurtleBot3 拓展9: Bike
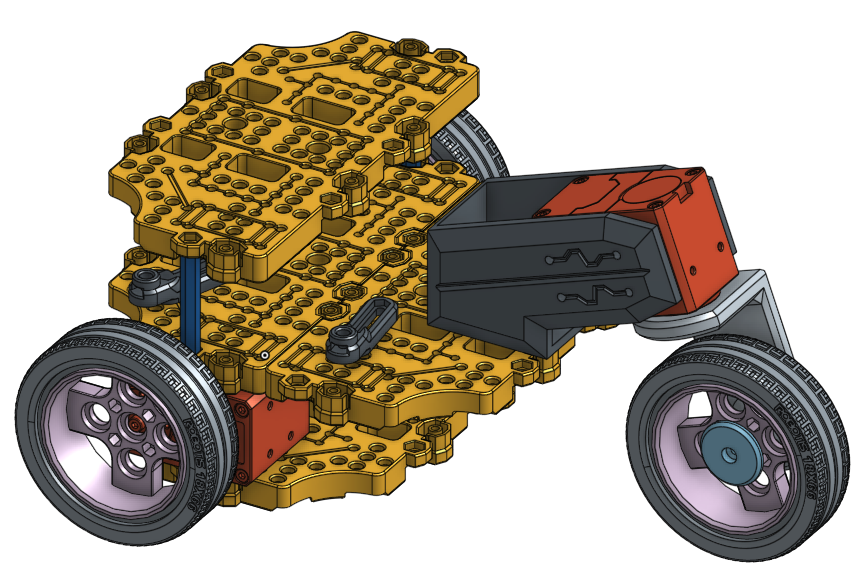
- 类型:3-DOF 摩托车
- 特点:可爱的三轮摩托车在 “汽车 “影片中显示了它的存在,是 “汽车 “的兄弟。
- 部件:三个DYNAMIXEL X 430系列(一个用于转向,两个用于驾驶),一个OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印底盘。
- BOM
- 硬件:(Onshape, Thingiverse)
- 软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_bike。 - 视频: 在上面的视频TurtleBot3 Friends: Car和TurtleBot3 Friends: monster中看到。
11.10 TurtleBot3 拓展10: Road Train
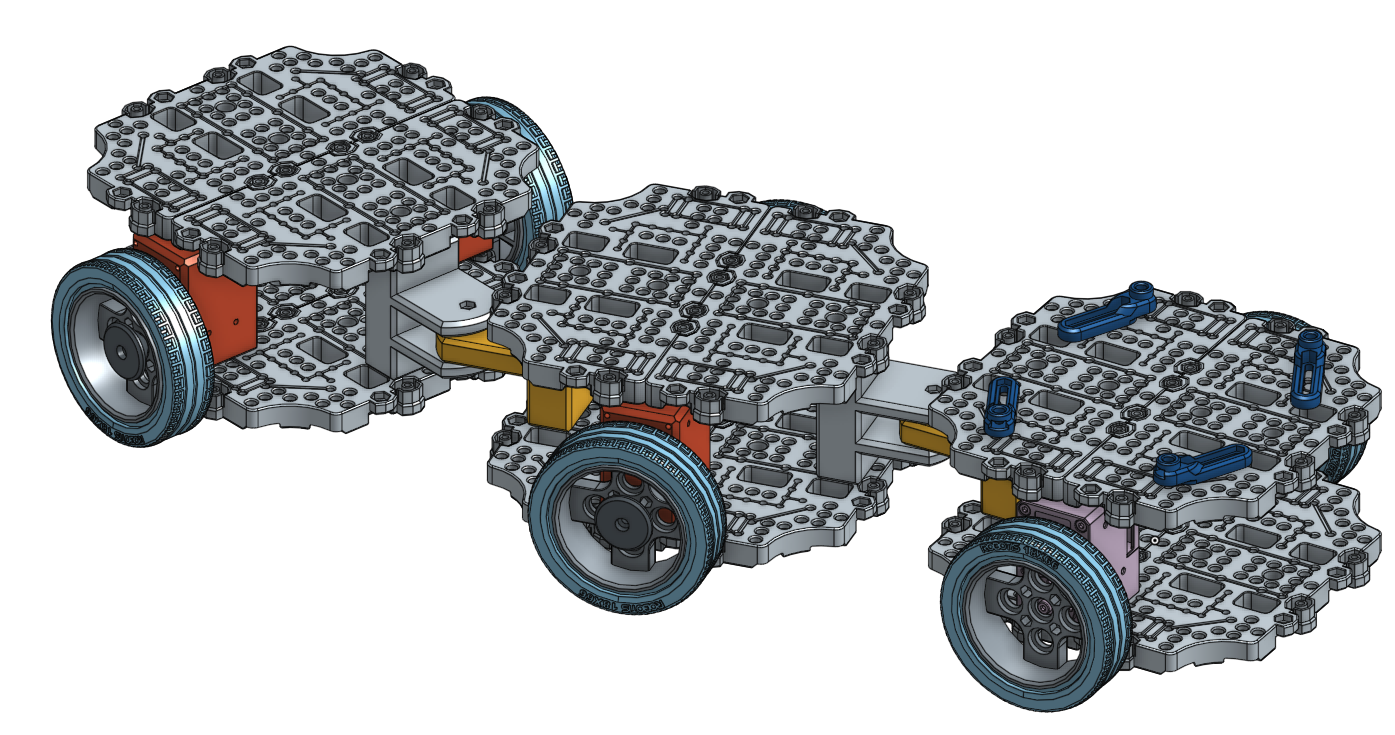
类型:公路列车
特点:公路列车可以连接车辆,它可以为各种事物提供服务!
部件:两个DYNAMIXEL X 430系列(两个用于驾驶),一个OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印底盘。
硬件:(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_road_train。视频:
11.11 TurtleBot3 拓展11: Real TurtleBot
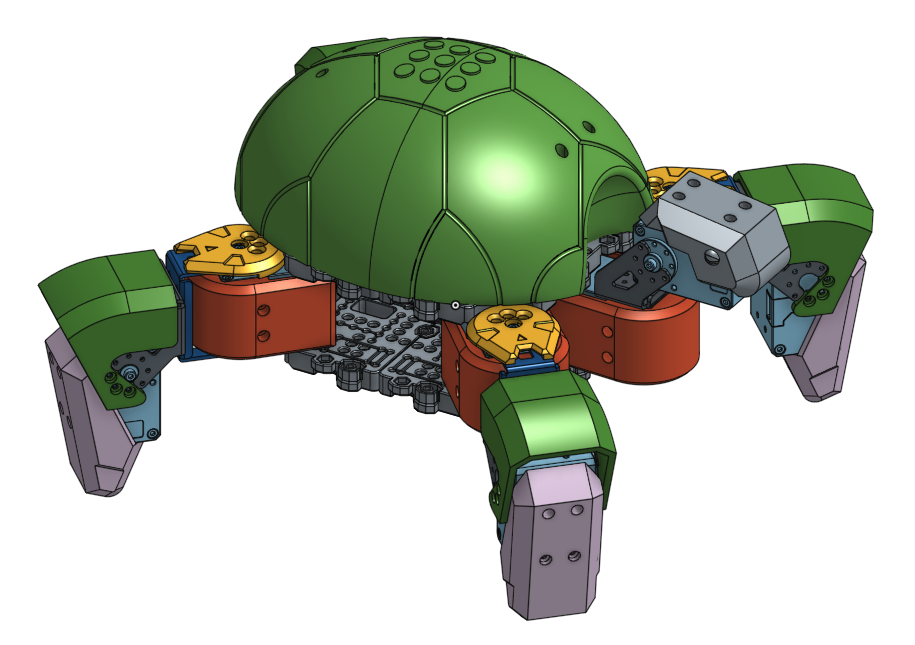
类型:8-DOF的腿部机器人(又名真正的TurtleBot)。
特点: 一个真正的TurtleBot将在Turtlebot社会中的大部分粉丝图片!。
组件:10个DYNAMIXEL X 430系列(4个用于腿部关节,另外4个用于肩部关节,2个用于头部),一个OpenCR1.0板,一个带有BT410主从蓝牙模块的RC100遥控器,TurtleBot3底盘和电池,3D打印底盘。
硬件:(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_friends→turtlebot3_realturtlebot。视频:
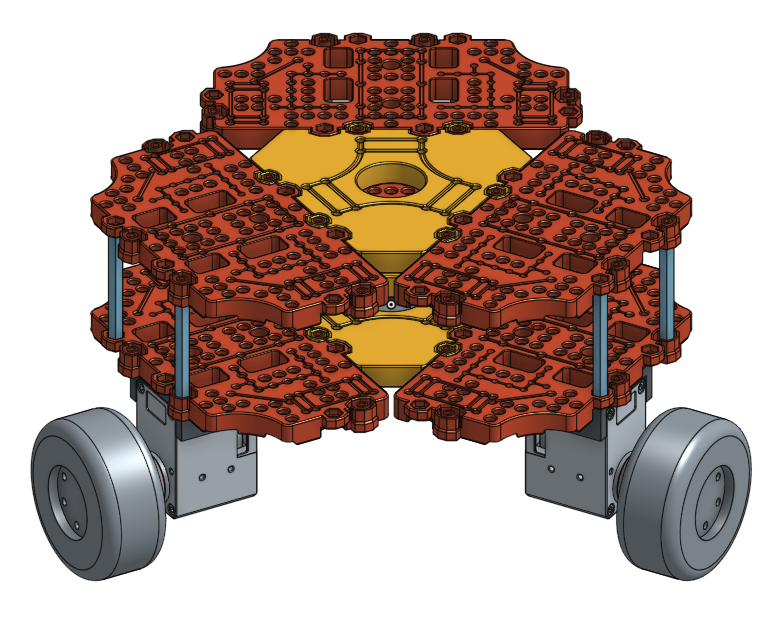
11.12 TurtleBot3 拓展12: Carrier

类型:2个轮子的移动平台作为服务机器人
特点:2个轮子的移动平台将为您提供任何您想要的服务。
组件: 一个TurtleBot3华夫饼,6个支架用于第四层,另外6个支架用于第五层结构,每层都有额外的华夫饼板,定制的3D打印车轮和球状脚轮。
硬件:(Onshape, Thingiverse)
软件:
Examples→turtlebot3→turtlebot3_waffle→turtlebot3_waffle。视频: