本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
模拟仿真
注意
- 请在远程PC上运行模拟程序。
- 在远程电脑上首次启动模拟,可能需要一段时间来设置环境。
 Read more about TurtleBot3 Simulation
Read more about TurtleBot3 Simulation
TurtleBot3 supports simulation development environment that can be programmed and developed with a virtual robot in the simulation. There are two development environments to do this, one is using a fake node with 3D visualization tool RViz, and the other is using the 3D robot simulator Gazebo.
- The fake node is suitable for testing with the robot model and movement, but it does not support sensors.
- If you need to perform SLAM or Navigation, Gazebo would be a feasible solution as it supports sensors such as IMU, LDS, and camera.
In this instruction, Gazebo will be mainly introduced which is most widely used among ROS developers.
- Gazebo Tutorials : http://gazebosim.org/tutorials
6.1 Gazebo 仿真
电子手册中的内容可以在不事先通知的情况下进行更新,视频内容可能已经过时。
本Gazebo模拟使用ROS Gazebo包,因此,在运行本指令前,必须安装适合ROS1 Kinetic的Gazebo版本。
6.1.1 安装模拟仿真包
TurtleBot3 Simulation Package需要turtlebot3和turtlebot3_msgs软件包作为前提条件。没有这些先决条件的软件包,模拟程序无法启动。
如果你没有安装所需的软件包和附属软件包,请按照PC Setup的说明进行操作。
1 | $ cd ~/catkin_ws/src/ |
6.1.2 运行仿真环境
为TurtleBot3准备了三种模拟环境。请从这些环境中选择一个来启动Gazebo。
在启动新的仿真环境时,请确保完全终止其他仿真环境。
Empty World
1
2$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_gazebo turtlebot3_empty_world.launchTurtleBot3 World
1
2$ export TURTLEBOT3_MODEL=waffle
$ roslaunch turtlebot3_gazebo turtlebot3_world.launchTurtleBot3 House
1
2$ export TURTLEBOT3_MODEL=waffle_pi
$ roslaunch turtlebot3_gazebo turtlebot3_house.launch
注意:+如果TurtleBot3 House是第一次启动,下载地图可能需要超过几分钟的时间,这取决于网络状态。
6.1.3 操作 TurtleBot3
为了用键盘对TurtleBot3进行远程操作,在一个新的终端窗口中用以下命令启动远程操作节点。
1 | $ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch |
Read more about How to run Autonomous Collision Avoidance
A simple collision avoidance node is prepared which keeps certain distance from obstacles and make turns to avoid collision.
In order to autonomously drive a TurtleBot3 in the TurtleBot3 world, please follow the instruction below.
Terminate the turtlebot3_teleop_key node by entering
Ctrl+Cto the terminal that runs the teleop node.Enter the below command to the terminal.
$ roslaunch turtlebot3_gazebo turtlebot3_simulation.launch
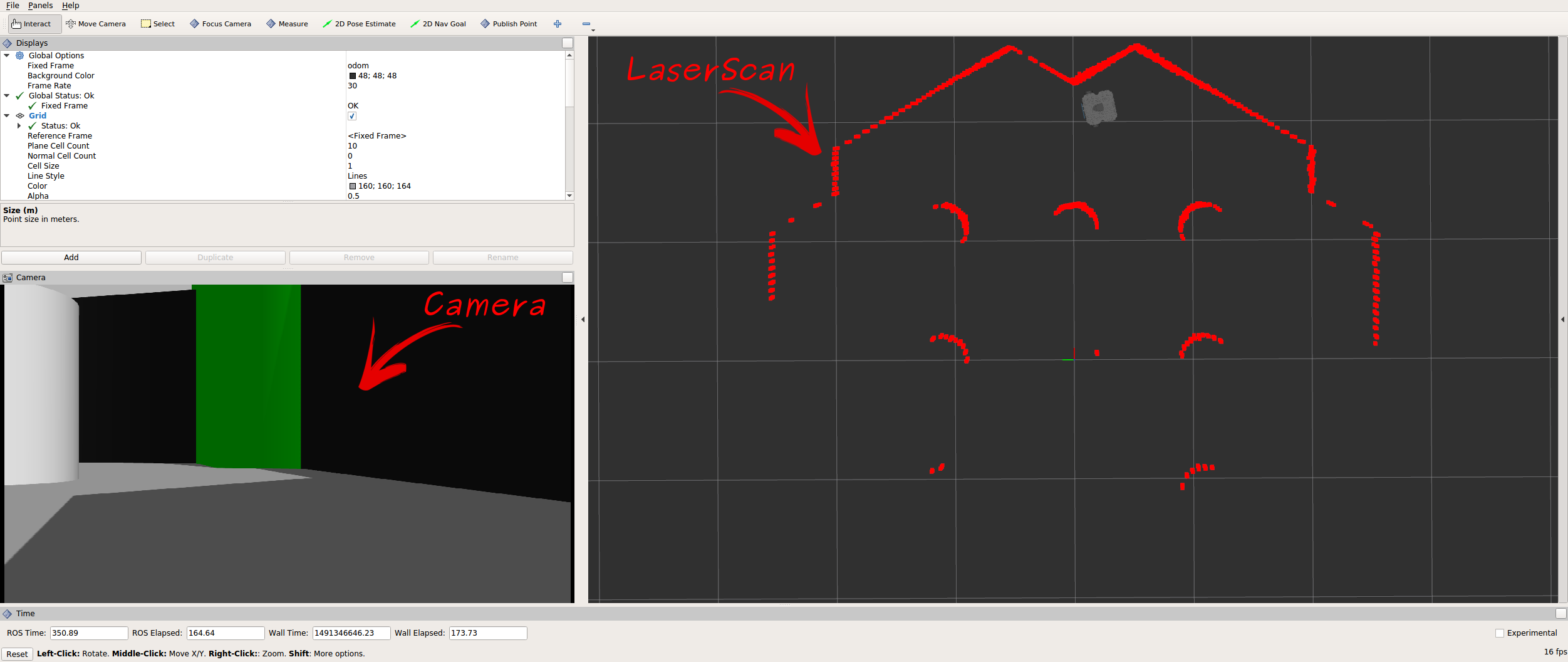
Read more about How to visualize Simulation data(RViz)
RViz visualizes published topics while simulation is running. You can launch RViz in a new terminal window by entering below command.
$ roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch