
本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
3. 快速入门
3.1 PC 设置
警告。本章的内容与控制TurtleBot3的 “远程电脑”(您的台式电脑或笔记本电脑)相对应。请勿将此说明应用于您的TurtleBot3。
兼容性警告
- Raspberry Pi 4 “不支持ROS Kinetic。
Jetson Nano不支持ROS Kinetic。
注意: 本指令在Linux上用Ubuntu 16.04和ROS Kinetic Kame测试。
3.1.1 在PC上下载并安装Ubuntu
- 下载Ubuntu 16.04 LTS Desktop:
- 根据下面教程安装系统:
3.1.2 在远程PC上安装ROS
用Ctrl+Alt+T打开终端,逐一输入以下命令。
为了检查简易安装脚本的细节,请参考脚本文件。
1 | $ sudo apt-get update |
If the above installation fails, please refer to the official ROS Kinetic installation guide.
3.1.3 安装ROS依赖包
1 | $ sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy \ |
3.1.4 安装 TurtleBot3 包
1 | $ sudo apt-get install ros-kinetic-dynamixel-sdk |
 Click here to expand more details about building TurtleBot3 package from source.
Click here to expand more details about building TurtleBot3 package from source.
如果你需要下载源代码并构建它们,请使用下面的命令。
请确保删除相同的软件包以避免冗余。
$ sudo apt-get remove ros-kinetic-dynamixel-sdk
$ sudo apt-get remove ros-kinetic-turtlebot3-msgs
$ sudo apt-get remove ros-kinetic-turtlebot3
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src/
$ git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/DynamixelSDK.git
$ git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone -b kinetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git
$ cd ~/catkin_ws && catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
3.1.5 设置TurtleBot3模型名称
将默认的
TURTLEBOT3_MODEL名称设为你的模型。在终端上输入以下命令。- 如果是TurtleBot3 Burger的话
1
$ echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc
- 如果是TurtleBot3 Waffle Pi的话
1
$ echo "export TURTLEBOT3_MODEL=waffle_pi" >> ~/.bashrc
3.1.6 网络设置
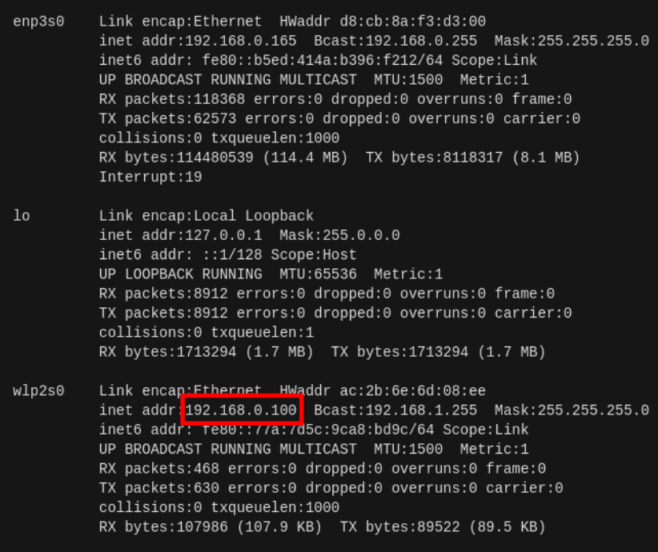
将PC连接到WiFi设备,用以下命令找到分配的IP地址。
1
$ ifconfig
打开该文件,用下面的命令更新ROS的IP设置。
1
$ nano ~/.bashrc
按
Ctrl+END或Alt+/将光标移至行尾。
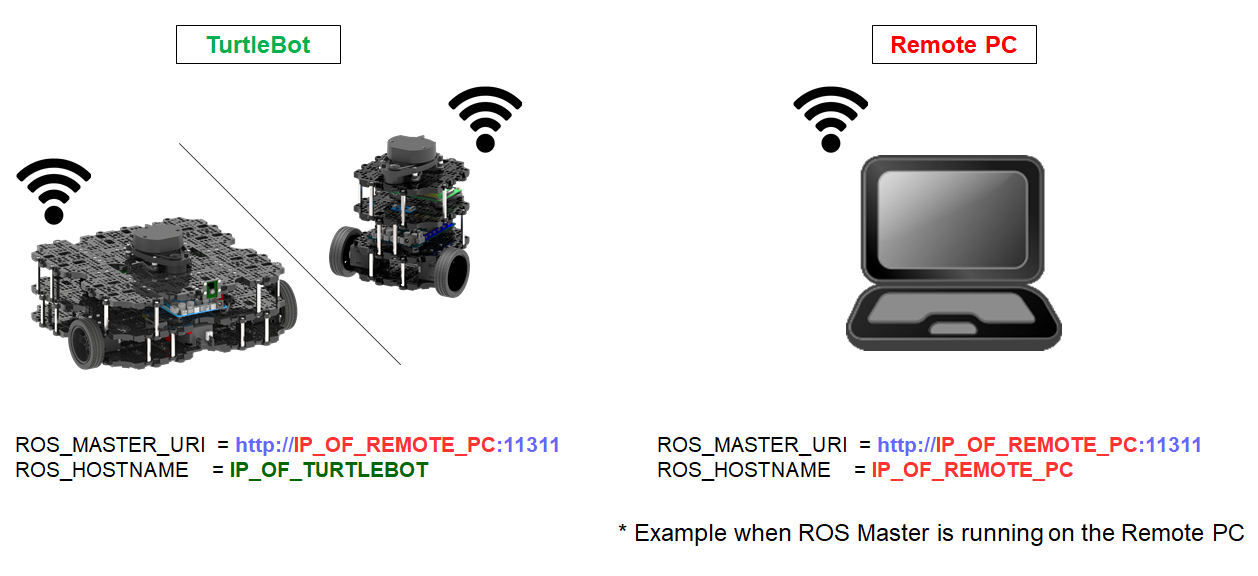
在ROS_MASTER_URI和ROS_HOSTNAME中修改localhost的地址,使用从上述终端窗口获得的IP地址。
用下面的命令对bashrc进行编程。
1
$ source ~/.bashrc