
本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
FAQ
- Enable SSH Server in Raspberry Pi
- Timesync between TurtleBot3 and Remote PC
- Setup DYNAMIXEL’s for TurtleBot3
- Can I Charge the Battery when the Battery is Connected to TurtleBot3?
- How to Download the STL files of TurtleBot3
- Intel® Joule™ USB-C Port is not Recognized on Windows 10
- Intel® Joule™ Freezes while Booting/Installation
- How to Update Software
- How to Update Firmware
14.1 在Raspberry Pi中启用SSH服务器
First you have to install SSH on Remote PC and Raspberry Pi.
首先,你必须在Remote PC 和Raspberry Pi上安装 “SSH”。
1 | $ sudo apt-get install ssh |
如果是Raspberry Pi(TurtleBot3 Burger和Waffle Pi),由于Ubuntu MATE 16.04.x和Raspbian的SSH服务器默认为禁用。如果你想启用SSH,请参考下面的文件。
或者你可以使用以下命令。
1 | $ sudo service ssh start |
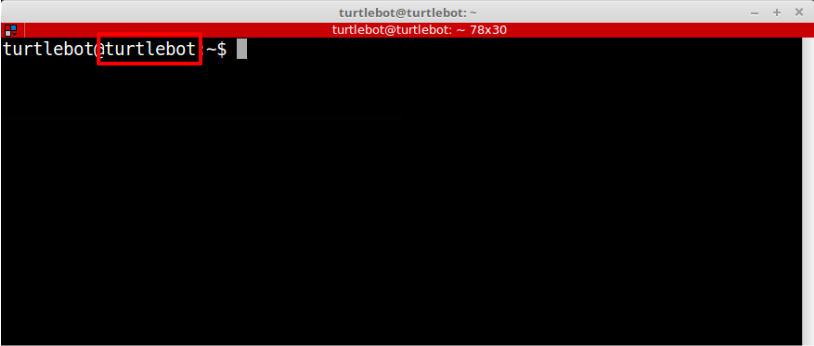
Before starting to connect SSH, you need to check host name. Redbox in below image shows it.
在开始连接SSH之前,你需要检查host name。下图中的红框显示了它。
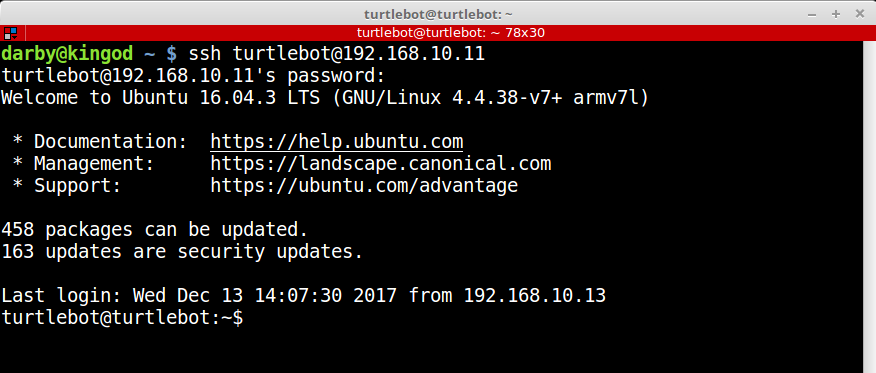
然后,你可以在 “远程电脑 “中使用SSH的下列命令。
1 | $ ssh ${HOSTNAME}@xxx.xxx.xx.xx |
14.2 TurtleBot3和远程PC之间的时间同步
- 注意: 这个解决方案需要在你的 “TurtleBot “和 “远程电脑 “在同一网络下连接互联网。
- 安装 “ntpdate”,并在 “TurtleBot “和 “远程电脑 “上同步到NTP服务器。
1 | $ sudo apt-get install ntpdate |
14.3 为 TurtleBot3 设置Dynamixel舵机
警告:请确保在OpenCR 1.0中只连接***个DYNAMIXEL。
打开OpenCR 1.0的电源,并通过USB线将板子与电脑连接起来。
按住 “SW2 “按钮并点击 “Reset “按钮。如果 “Status “LED在闪烁,释放 “SW2 “按钮。更多信息见[Boot Sequence](https://emanual.robotis.com/docs/en/parts/controller/opencr10/#boot-sequence)。
向OpenCR上传设置固件
如下图所示,找到Examples>turtlebot3>turtlebot3_setup>turtlebot3_setup_motor并打开该例子。
点击Arduino IDE上的上传按钮。如果上传至OpenCR的例子已经完成,请将一个DYNAMIXEL连接到OpenCR上。
点击右上角的Serial Monitor图标,如下图所示。
重置OpenCR
如果例子不能正常运行,请按RESET按钮。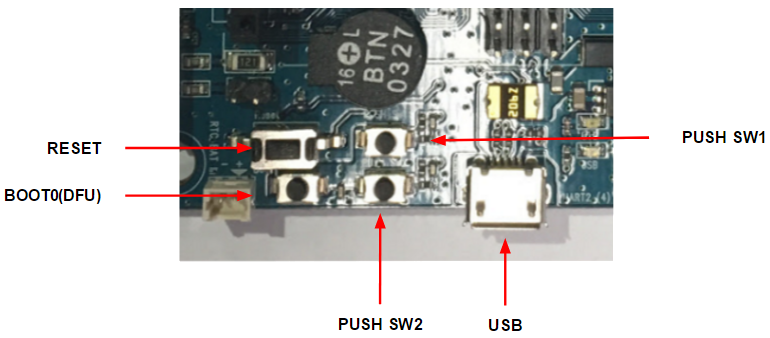
选择一个选项当
Serial Monitor运行时,将显示DYNAMIXEL设置的菜单,如下所示。
TurtleBot3由两个DYNAMIXEL的执行器组成,分别为左轮和右轮,所以要根据装配的位置选择合适的选项。
例如,要设置左侧的DYNAMIXEL,在输入文本框中输入1。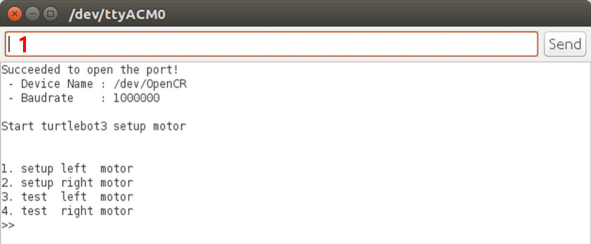
确认为了防止任何错误,需要进行确认。
要继续进行配置,请在输入文本框中输入 “Y”。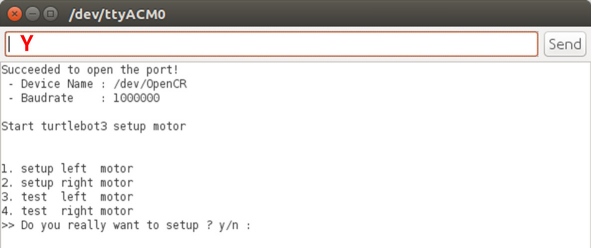
设置DYNAMIXEL设置工具开始使用不同的ID和波特率搜索连接的DYNAMIXEL。
如果检测到DYNAMIXEL,它将自动为TurtleBot3进行设置。
当设置完成后,”OK “信息将被打印在屏幕上。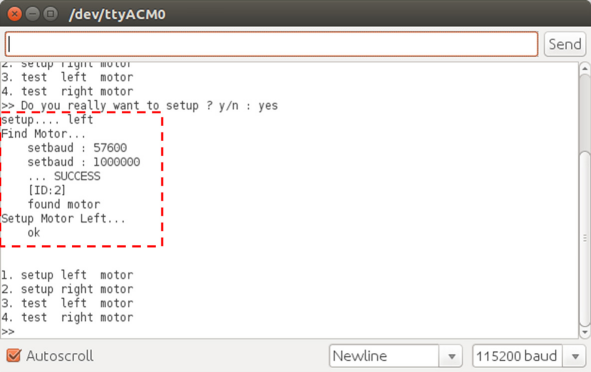
测试DYNAMIXEL完成设置程序,并验证是否已经正确地进行了改变。
选择其中一个测试选项,然后选择DYNAMIXEL将迭代旋转,并根据所选轮子的情况,每隔1秒向逆时针或顺时针方向停止。
要结束测试,请按 “Enter “键。
例如,要测试左边的DYNAMIXEL,请输入3',如下图所示,或者输入4’进行右轮测试。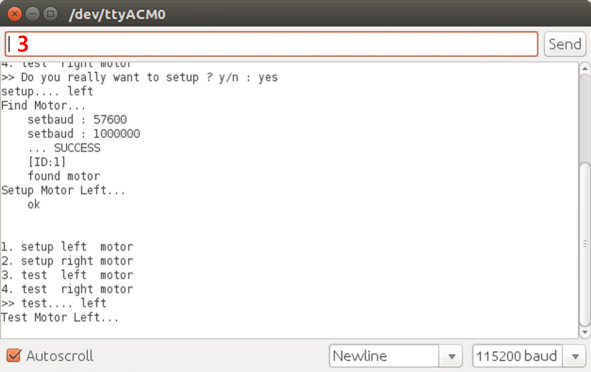
上载TurtleBot3 Core
如果DYNAMIXEL设置完成,TurtleBot3的核心例子应该上传到OpenCR。
请从Examples>tutlebot3>turtlebot3_burger或turtlebot3_waffle>turtlebot3_core中找到合适的核心实例,并将该实例上传到OpenCR。
14.4 当电池与TurtleBot3连接时,我可以给电池充电吗?
不建议在同一时间对电池进行充电和放电,这可能使产品的保修失效。如果TurtleBot3在充电/更换电池时需要开机,请遵循以下程序。
- 将SMPS 12V 5A连接到OpenCR
- 将耗尽的电池从OpenCR上断开。
- 将耗尽的电池连接到电池充电器上,或用一个充满电的电池替换耗尽的电池。
- 将充满电的电池连接到OpenCR
- 从OpenCR上断开SMPS 12V 5A的连接
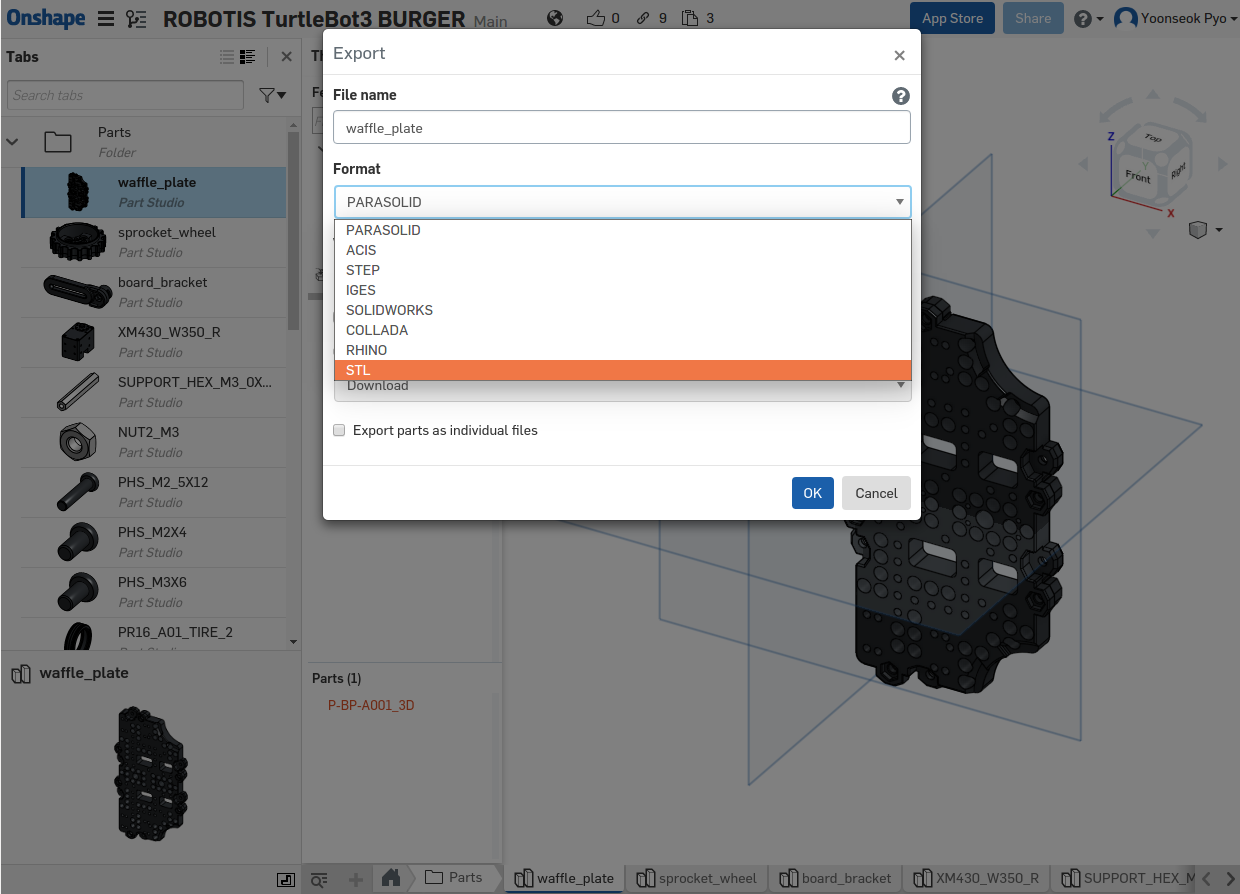
14.5 如何下载TurtleBot3的STL 文件
你可以通过以下方式下载它。
我们在下面的链接中发布了TurtleBot3 Friends的硬件设计文件。
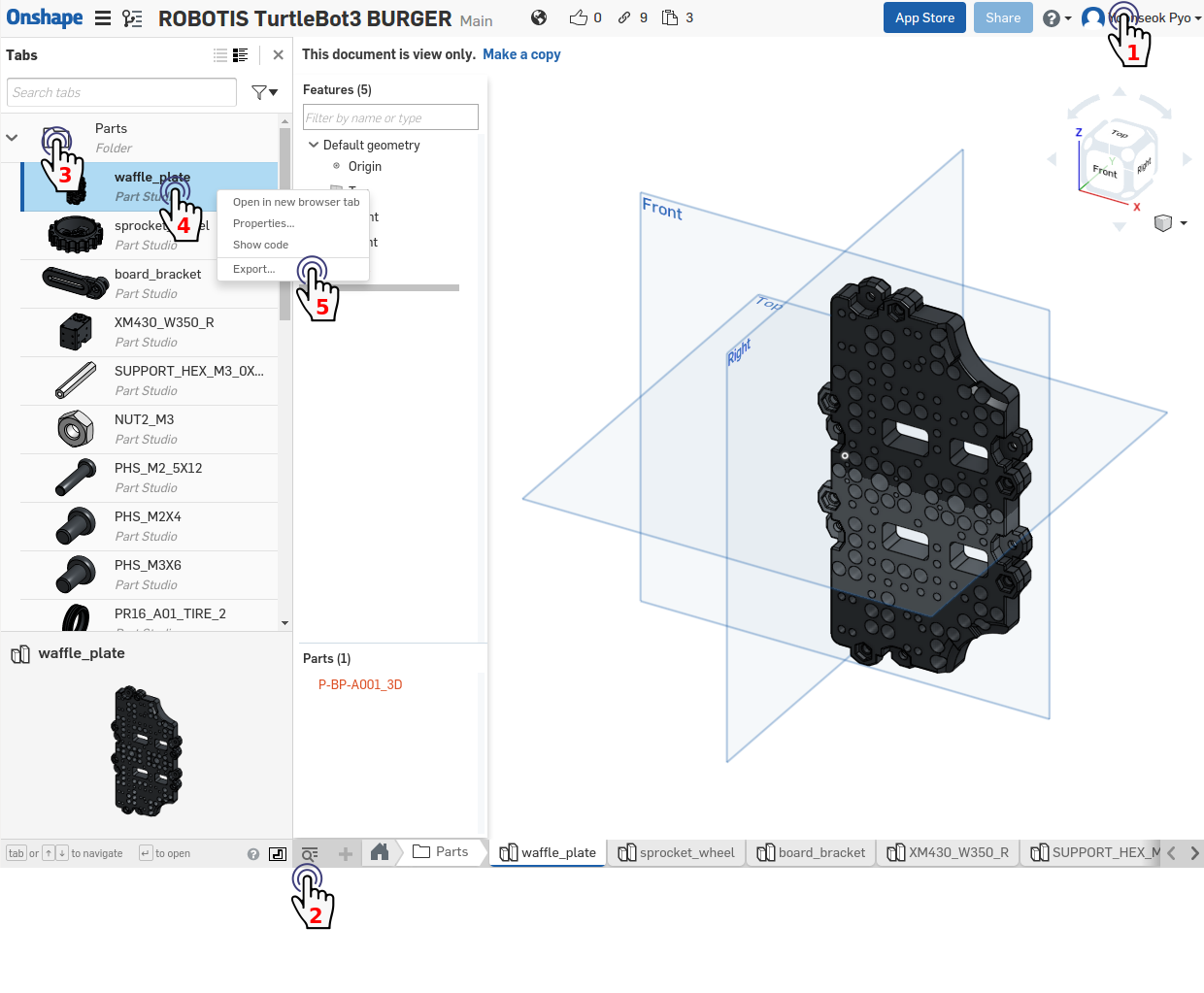
因此,您可以从每个Onshape地址直接下载STL文件,如下图所示。
- 登录。(如果你没有ID,你必须创建一个ID)。
- 点击 “切换标签管理器”(在浏览器的左侧会出现一个菜单。)
- 点击 “零件文件夹”
- 右键点击你想下载的文件的图标。
- 点击 “导出…”
- 最后,你可以下载你想要的输出文件类型。
14.6 Intel® Joule™ USB-C 端口在Windows 10中无法识别
一些用户报告说,当他们试图更新BIOS时,USB-C端口在Windows 10上无法识别。请查看下面的链接,其中描述了解决的方法(感谢Rknlhrqy和VRAORESEARCH)。
14.7 Intel® Joule™在启动/安装时卡死
如果BIOS固件没有正确安装,可能会发生这种情况。请重新刻录BIOS固件的193发布版本。
关闭 Joule。
使用以下链接的文件进行BIOS固件#193更新。
确保你看到红框中的信息。

14.9 如何更新软件
[TurtleBot3]
1 | $ cd ~/catkin_ws/src/ |
[远程PC]
1 | $ cd ~/catkin_ws/src/ |
14.10 如何更新固件
[TurtleBot3]
- Burger
1 | $ export OPENCR_PORT=/dev/ttyACM0 |
- Waffle or Waffle Pi
1 | $ export OPENCR_PORT=/dev/ttyACM0 |