
本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
13.1 附录
DYNAMIXEL舵机

概览
DYNAMIXEL X系列 “是一个新阵容的高性能网络化执行器模块,它已被广泛用于构建各种类型的机器人,具有可靠性和可扩展性。
TurtleBot3 Burger、Waffle和Waffle Pi采用了两种不同类型的DYNAMIXEL,因为它们有不同的要求。DYNAMIXEL X系列共享其设计,因此,用户可以根据应用情况更换执行器。
- 基本特点
- 改进的扭矩和紧凑的尺寸
- 增强了耐用性和可扩展性
- 中空的后壳将电缆的压力降到最低(3-way-routing)。
- 直接用螺钉装配到外壳上(无螺母插入)。
- 改进的散热器,采用铝制外壳
- 各种控制功能
- 6种操作模式
- 基于电流的扭矩控制(4096步,2.69mA/步)
- 用于平滑运动规划的轮廓控制
- 轨迹数据和运动状态(在位、跟随误差等)。
- 节能(将电流从100mA降至40mA)
技术规格
| Items | XL430-W250 (for Burger) | XM430-W210 (for Waffle and Waffle Pi) |
|---|---|---|
| Microcontroller | ST CORTEX-M3 (STM32F103C8 @ 72Mhz, 32bit) | ST CORTEX-M3 (STM32F103C8 @ 72Mhz, 32bit) |
| Position Sensor | Contactless Absolute Encoder (12bit, 360°) | Contactless Absolute Encoder (12bit, 360°) |
| Motor | Cored Motor | **Coreless Motor ** |
| Baud Rate | 9600 bps ~ 4.5 Mbps | 9600 bps ~ 4.5 Mbps |
| Control Modes | Velocity, Position, Extended Position, PWM | Velocity, Position, Extended Position, PWM, Current, Current-base Position |
| Gear Ratio | 258.5 : 1 | 212.6 : 1 |
| Stall Torque | 1.0 N.m (@ 9V, 1A) | 2.7 N.m (@ 11.1V, 2.1A) |
| 1.4 N.m (@ 11.1V, 1.3A) | 3.0 N.m (@ 12V, 2.3A) | |
| 1.5 N.m (@ 12V, 1.4A) | 3.7 N.m (@ 14.8V, 2.7A) | |
| No Load Speed | 47rpm (@ 9V) | 70rpm (@ 11.1V) |
| 57rpm (@ 11.1V) | 77rpm (@ 12V) | |
| 61rpm (@ 12V) | 95rpm (@ 14.8V) | |
| Communication | TTL Level Multi Drop Bus | TTL Level / RS485 Multi Drop Bus |
| Material | Engineering Plastic | Full Metal Gear, Metal Body, Engineering Plastic |
| Standby Current | 52mA | 40mA |
关于执行器的更多信息可以在以下ROBOTIS电子手册链接中找到。
- XL430-W250 用于TurtleBot3 Burger。
- XM430-W210 用于TurtleBot3 waffle 和 waffle Pi
DYNAMIXEL SDK
![]()
ROBOTIS DYNAMIXEL SDK是一个软件开发库,为分组通信提供DYNAMIXEL控制功能。该API是为DYNAMIXEL执行器和基于DYNAMIXEL的平台设计的。TurtleBot3在OpenCR中使用DYNAMIXEL SDK来控制执行器。
- 更多关于DYNAMIXEL SDK的信息可以在以下ROBOTIS电子手册和GitHub链接中找到。
13.2 兼容设备
- 如果你想使用其他产品来代替基本配置中包含的计算机和传感器,请参考本页面。
计算机(SBC)
- TurtleBot3的主要计算机是
Raspberry Pi 3(TurtleBot3 Burger和Waffle Pi)和Intel Joule 570x(TurtleBot3 Waffle)。这些SBC(单板计算机)足以使用TurtleBot3的基本功能,但用户需要提高CPU性能,使用GPU,或增加RAM大小以达到其他目的。本节介绍如何更换SBC。 - 如下图所示,有各种类型的SBC。每个SBC的规格是不同的。但如果你能在你想使用的SBC上安装Linux和ROS,你就可以使用该SBC作为TurtleBot3的主电脑。除了SBC之外,还有英特尔NUC、迷你电脑和小型笔记本。
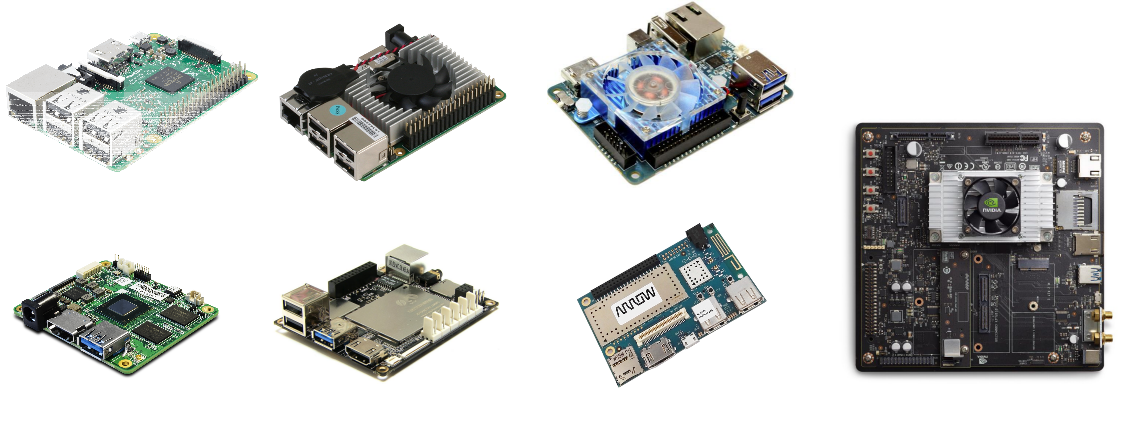
- TurtleBot3开发团队已经测试了几个SBC。以下是我们测试过的SBC的清单:
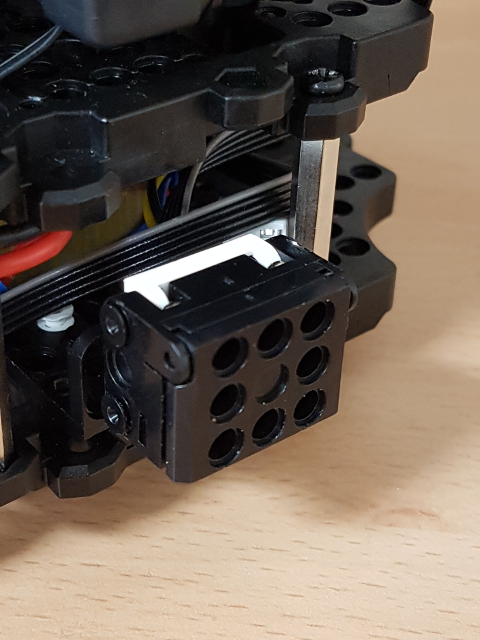
硬件组装
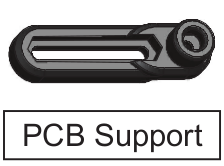
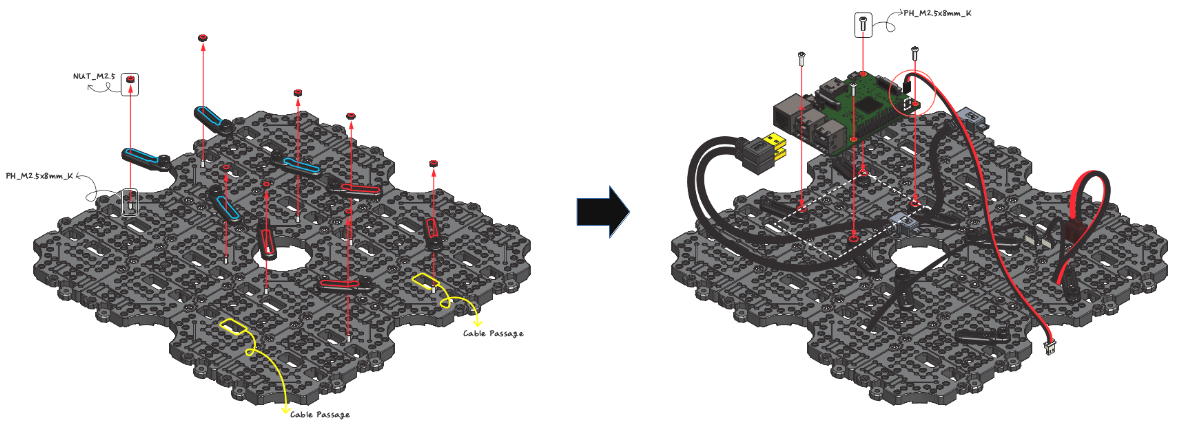
- 你可以在TurtleBot3的华夫板上使用PCB支架固定要使用的SBC的固定孔,如下图所示,固定SBC。
电源供应
- SBC的硬件组装很简单。但是电源并不简单。你需要修改现有的电源线或制作一个新的电源线以配合你要使用的电脑的`电源线’。
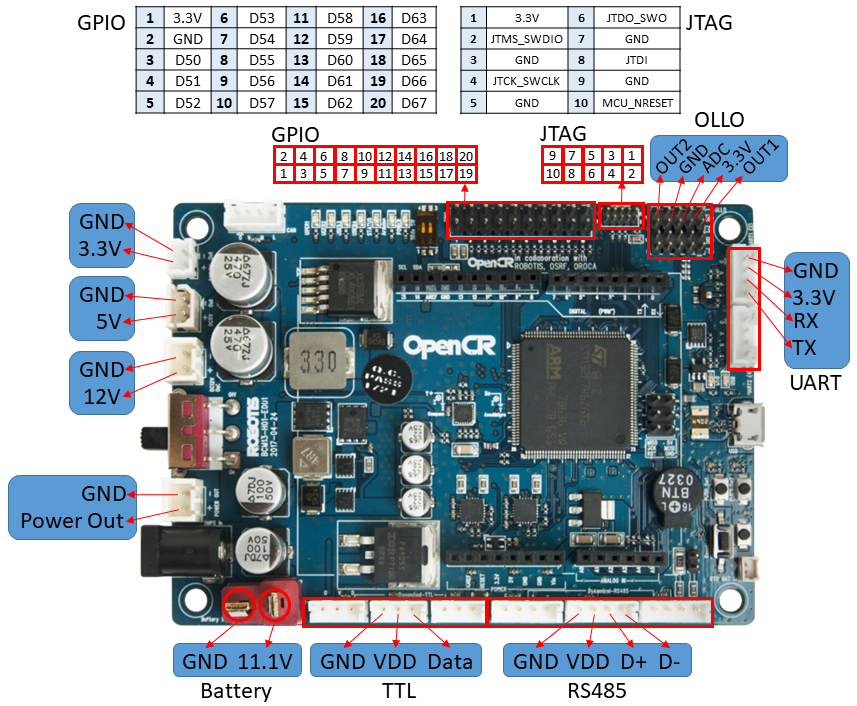
- 作为TurtleBot3的基本部分,提供了以下`电源线’。左图是Raspberry Pi,右图是Intel Joule 570x。电源线的制作必须符合你所使用的计算机的电源规格。OpenCR有5V(4A)电源和12V(1A)电源,这在SBC中是常用的。
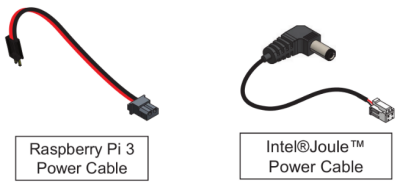
- SBC的电源是下面OpenCR引脚图中左边的三个连接器。
传感器
TurtleBot3 Burger使用增强的360° LiDAR、9轴惯性测量单元和精确编码器供您研究和开发。TurtleBot3 Waffle也配备了相同的360°激光雷达,但另外提出了一个强大的Intel® RealSense™与识别SDK。TurtleBot3 Waffle Pi使用高利用率的Raspberry Pi Camera。这将是制作移动机器人的最佳硬件解决方案。- 如果你使用一个额外的传感器,你可以在将传感器安装到机器人上后使用。ROS提供了一个开发环境,其中可以使用上述传感器的驱动程序和库。并非所有的传感器都被ROS软件包所支持,但越来越多的传感器相关软件包正在增加。

- 如果你正在寻找一个新的传感器,请查看ROS Wiki的传感器页面,找到你想要的传感器和相关的ROS包。
- 如果你使用的是连接到嵌入式板的模拟传感器,你可以用OpenCR来使用它。如果你需要使用USB或以太网通信以外的模拟传感器,请参考附加传感器页面。
13.3 附加传感器
TurtleBot3可以附加额外的传感器。这里显示的例子可以说明如何在TurtleBot3的OpenCR中使用额外的传感器,如红外、超声波、开关等。
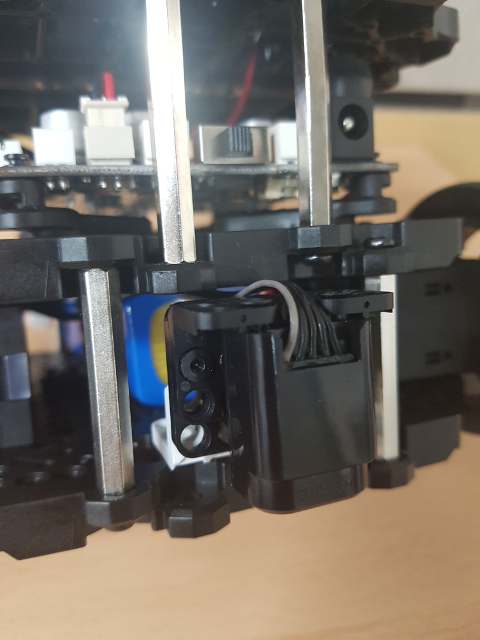
碰撞传感器
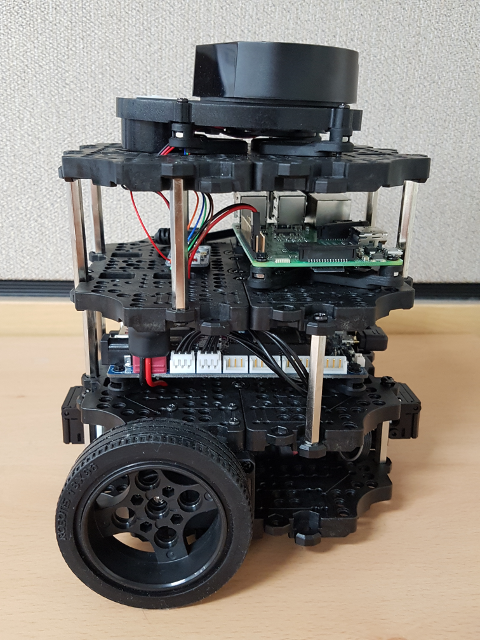
(前视图)
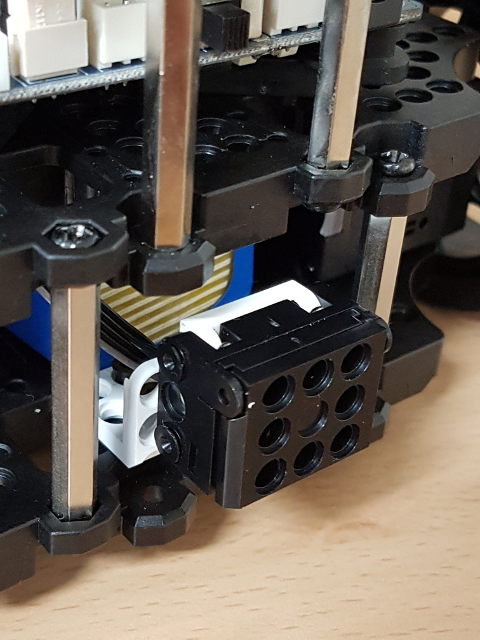
(后视图)
- 默认PIN
| Device | PIN |
|---|---|
| Front sensor | ROBOTIS_5-PIN 3 |
| Back sensor | ROBOTIS_5-PIN 4 |
提示:如果你想使用其他密码,请参考OpenCR密码地图。
- 使用Turtlebot3运行
警告 : 在执行示例之前,请确保运行Bringup指令。
**[远程PC]**启动碰头启动文件。
1 | $ roslaunch turtlebot3_example turtlebot3_bumper.launch |
- 运行Arduino IDE
这个例子可以打开【Arduino IDE】(http://emanual.robotis.com/docs/en/parts/controller/opencr10/#arduino-ide)。
选择 File -> Examples -> ROS -> 2. Sensors -> a_Bumper。上传至OpenCR。
[Remote PC] 运行 ros serial_node 节点.
1 | $ rosrun rosserial_python serial_node.py __name:=turtlebot3_core _port:=/dev/ttyACM0 _baud:=115200 |
警告 。如果你上传例子到OpenCR,你必须重新上传turtlebot3_core。
IR
- 默认PIN
| Device | PIN |
|---|---|
| IR sensor | ROBOTIS_5-PIN 2 |
提示:如果你想使用其他密码,请参考OpenCR密码地图。
- 使用Turtlebot3运行
警告 : 在执行示例之前,请确保运行Bringup指令。
**[远程电脑]**启动cliff launch文件。
1 | $ roslaunch turtlebot3_example turtlebot3_cliff.launch |
- 运行 Arduino IDE
这个例子可以打开【Arduino IDE】(http://emanual.robotis.com/docs/en/parts/controller/opencr10/#arduino-ide)。
选择 File -> Examples -> ROS -> 2. Sensors -> b_Cliff。上传至OpenCR。
[Remote PC] 运行 ros serial_node 节点.
1 | $ rosrun rosserial_python serial_node.py __name:=turtlebot3_core _port:=/dev/ttyACM0 _baud:=115200 |
Ultrasonic 超声波
- 设备- 超声波传感器 (HC-SR04)
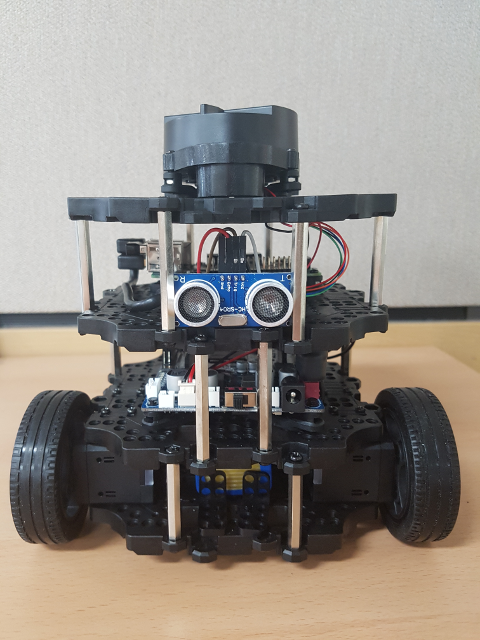
- 默认PIN:
| Device | PIN |
|---|---|
| Trigger | BDPIN_GPIO_1 |
| Echo | BDPIN_GPIO_2 |
提示:如果你想使用其他密码,请参考OpenCR密码地图。
- 使用Turtlebot3运行
警告 : 在执行示例之前,请确保运行Bringup指令。
**[远程PC]**启动声纳发射文件。
1 | $ roslaunch turtlebot3_example turtlebot3_sonar.launch |
- 运行 Arduino IDE
这个例子可以打开【Arduino IDE】(http://emanual.robotis.com/docs/en/parts/controller/opencr10/#arduino-ide)。
选择 File -> Examples -> ROS -> 2. Sensors -> c_Ultrasonic。上传至OpenCR。
**[远程PC]**运行ros serial_node节点
1 | $ rosrun rosserial_python serial_node.py __name:=turtlebot3_core _port:=/dev/ttyACM0 _baud:=115200 |
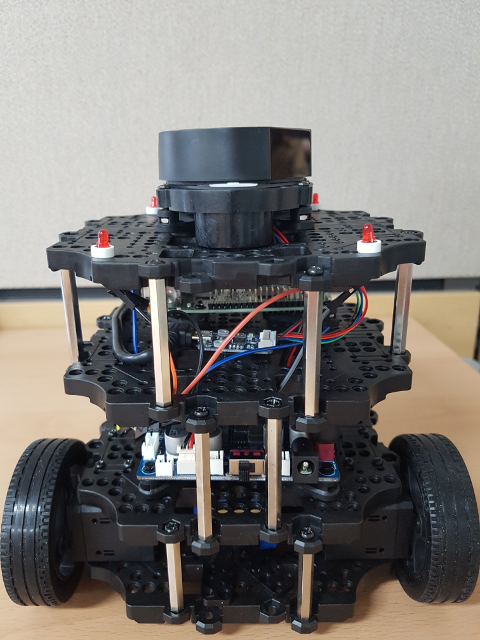
Illumination 光敏电阻传感器
- 设备- LDR sensor (Flying-Fish MH-sensor)
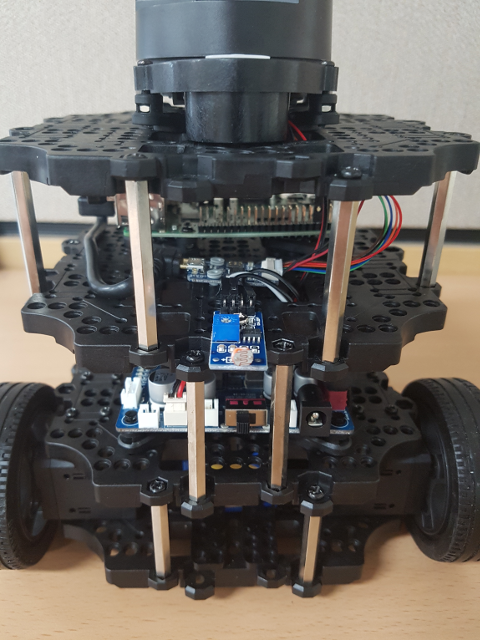
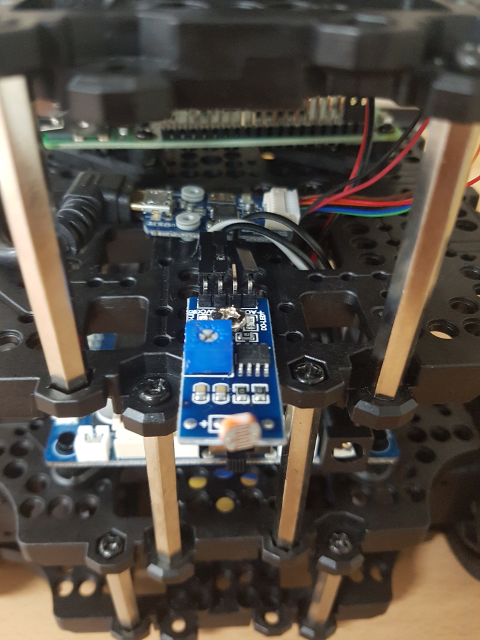
- 默认PIN
| Device | PIN |
|---|---|
| Analog | A1 |
提示:如果你想使用其他密码,请参考OpenCR密码地图。
- 使用Turtlebot3运行
警告 : 在执行示例之前,请确保运行Bringup指令。
**[远程PC]**启动illumination launch文件。
1 | $ roslaunch turtlebot3_example turtlebot3_illumination.launch |
用Arduino IDE运行
这个例子可以打开[Arduino IDE](http://emanual.robotis.com/docs/en/parts/controller/opencr10/#arduino-ide)。
选择
File->Examples->ROS->2. Sensors->d_Illumination。上传至OpenCR。**[远程PC]**运行ros serial_node软件包。
1 | $ rosrun rosserial_python serial_node.py __name:=turtlebot3_core _port:=/dev/ttyACM0 _baud:=115200 |
LED
- 设备 led (led101)

- 默认 PIN
| Device | PIN |
|---|---|
| Front_left | BDPIN_GPIO_4 |
| Front_right | BDPIN_GPIO_6 |
| Back_left | BDPIN_GPIO_8 |
| Back_right | BDPIN_GPIO_10 |
提示:如果你想使用另一个密码,请参考OpenCR PIN Map。
- 运行
这个例子在连接led时一直处于激活状态。led显示的特定图案取决于Turtlebot3的线速度和角速度。
13.4 开放源代码和许可证
- TurtleBot3 Software
- OpenCR1.0 Firmware
- Reference Software for TurtleBot3
OpenSource Hardware
- Circuit and PCB Gerber Files
- TurtleBot3 Hardware
- TurtleBot3 Frineds Hardware
- OpenManiapulator Hardware
软件许可证
主要的软件是根据Apache许可证2.0发布的。然而,一些源代码是在3-Clause BSD License或GPLv3的许可下。
硬件许可证
TurtleBot3是一个由[开源硬件原则和定义声明V1.0](http://freedomdefined.org/OSHW)描述的开源硬件项目。
文档许可证
文档是在 CC BY 4.0下发布的。
13.5 联系我们
关于 Open Robotics
![]()
Open Robotics is an independent non-profit organization founded by members of the global robotics community. The mission of Open Robotics is to support the development, distribution, and adoption of open source software for use in robotics research, education, and product development.
- Address : 170 S Whisman Rd, Building D, Suite A, Mountain View, CA 94041, USA
- E-Mail : turtlebot@osrfoundation.org
关于 ROBOTIS
![]()
ROBOTIS was derived from a simple response to the question, “What is a Robot?”.
Thus, ROBOTIS = “ROBOT IS…”
There are many answers to this question, but we strive to develop and apply products that would impact our daily lives and make robots more personal rather than an intelligent appliance. Imaginations can become reality through personal robots.
ROBOTIS US Office
- Address: 26228 Enterprise Ct Lake Forest, CA 92630, USA
- Tel: +1-949-377-0377
- Fax: +1-949-242-5112
- Web: http://en.robotis.com/
- E-Mail: america@robotis.com
ROBOTIS China Office
- Address: Room 1103, Building B, Jiajing Tiancheng, Chaoyang District, (100102) Beijing, China
- Tel: +86-10-5726-7179
- Web: http://cn.robotis.com/
- E-Mail: china@robotis.com
ROBOTIS Japan Office
- Address: Haruka Building 3F, 2 Chome−12-14, Kanda Ogawamachi, Chiyoda-ku, Tokyo-to, Japan
- Tel: +81-3-6869-8804
- Web: http://jp.robotis.com/
- E-Mail: japan@robotis.com
ROBOTIS Korea Office
- Address: 37, Magok Jungang 5-ro 1-gil, Gangseo-gu, Seoul, Korea 07594
- Tel: +82-70-8671-2609
- Fax: +82-70-8230-1336
- Web: http://www.robotis.com/
- E-Mail: contactus2@robotis.com
关于 OST (Open Source Team)
- Members : Ashe Kim, Daniel Seon, Darby Lim, Hancheol Cho, Jason Jin, Leon Jung, M. Y, Will Son, Yoonseok Pyo
- Alumni : Christopher Tatsch, Yoshihiro Shibata
- Supporter : JangHo Kim, Jinwook Kim, Woosik Yang, OROCA
- Collaboration Team : Open Robotics, Intel, OROCA, Onshape, OSU
We are Open Source Team in ROBOTIS HQ. With open source hardwares and softwares, our robot friends are hoping to enrich our lives. We mainly develop and support DYNAMIXEL SDK, OpenManipulator, OpenCM, OpenCR and OpenAutonomousCar. Our favorite platform is ROS! :) We are delighted to be in charge of developing TurtleBot3, the official reference platform for ROS, and in the future we will be the team that can support you to get closer to your robot dreams.
- GitHub : https://github.com/ROBOTIS-GIT
- E-Mail : ost@robotis.com