
本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
12.1 AWS RoboMaker与Turtlebot3
AWS RoboMaker是一项服务,它使大规模开发、测试和部署智能机器人应用变得容易。RoboMaker扩展了最广泛使用的开源机器人软件框架–机器人操作系统(ROS),并与云服务连接。这包括AWS的机器学习服务、监控服务和分析服务,这些服务使机器人能够进行数据流、导航、通信、理解和学习。RoboMaker为应用开发提供机器人开发环境,为加速应用测试提供机器人模拟服务,为远程应用部署、更新和管理提供机器人车队管理服务。
Turtlebot3 AWS RoboMaker 开发例程
AWS RoboMaker – Develop, Test, Deploy, and Manage Intelligent Robotics Apps

使用Turtlebot3的AWS RoboMaker强化学习实例
12.2 通过Matlab收集数据
感谢MathWorks公司的机器人和人工智能教育家Sebastian Castro,他为Matlab工具与ROS的使用提供了一个很好的材料。
这篇文章,自主系统如何 “看”?深入解释了Matlab工具与ROS的结合;特别是通过TurtleBot3自动赛进行自主驾驶。
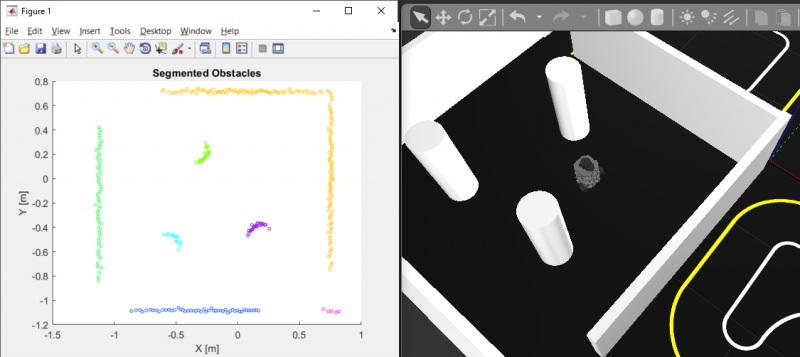
通过Matlab工具进行障碍物检测。
- 参考资料:
12.3 构建
本MASTERING WITH ROS: TurtleBot3讲座由[建设](http://www.theconstructsim.com/)制作。在本课程中,你将学习如何开始使用TurtleBot3机器人,探索其功能,以及如何建立有趣的ROS应用。如果你想了解更多关于ROS的知识,请查看[ROBOT IGNITE ACADEMY](http://www.theconstructsim.com/construct-learn-develop-robots-using-ros/robotigniteacademy_learnros/),它包含一系列与在线模拟相关的ROS教程,为你提供了解和创建任何基于ROS的机器人开发的工具和知识。
掌握ROS:TurtleBot3
你将从MASTERING WITH ROS: TurtleBot3 (Python)学到什么。
- TurtleBot3机器人的基本用法和控制
- 如何使用TurtleBot3进行导航
- 用TurtleBot3跟踪一条线
- 用TurtleBot3进行物体识别
- 用TurtleBot3在Moveit中进行运动规划
- 用TurtleBot3抓取
使用RDS v2.0在5分钟内运行TurtleBot3模拟。
TurtleBot3激光扫描订购
12.4 TurtleBot3 Blockly
用Blockly编程运行TurtleBot3 (本教程由Dabit Industries编写)
- Blockly Wiki。关于如何使用Blockly(免费和开源软件)和TurtleBot3的详细文档。

12.5 [TurtleBot3 在ROS Indigo是模拟仿真
Ubuntu 14.04中的TurtleBot3模拟器 (本教程由Cyaninfinite编写)
12.6 Youtube 教程
本ROS课程是基于我们从TurtleBot3、OpenCR和OpenManipulator等ROS项目中积累的经验而编写的ROS机器人编程指南。我们试图使其成为一个全面的指南,涵盖ROS初学者所需的所有方面。其中包括嵌入式系统、移动机器人和用ROS编程的机器人手臂等主题。对于那些刚接触ROS的人来说,整个课程都有脚注,提供更多的网络信息。通过这本ROS课程和书籍,我们希望更多的人能够了解并参与推进不断加速的机器人工程的集体知识。
12.7 Books
本手册是为以下人员编写的
想学习基于ROS(机器人操作系统)的机器人编程的大学生和研究生,以及从事机器人开发或软件编程的专业研究人员和工程师。我们试图提供我们在开发TurtleBot3和OpenManipulator时学到的详细信息。我们希望这本书能够成为ROS初学者的完整手册,并希望更多的人能够为不断增长的开放机器人社区做出贡献。
你将从本书中学到什么
从基本概念到实际的机器人应用编程!
- ROS Kinetic Kame : 基本概念、说明和工具
- 如何在ROS上使用传感器和执行器包
- 用于ROS的嵌入式板。OpenCR1.0
- 使用TurtleBot3进行SLAM和导航
- 如何使用ROS Java为送货机器人编程
- 使用MoveIt!和Gazebo模拟OpenManipulator