
本文档由北京小芽科技翻译,原文来自于ROBOTIS官方技术文档。
6.2 SLAM 仿真
在Gazebo模拟器中进行SLAM时,你可以在虚拟世界中选择或创建各种环境和机器人模型。除了准备模拟环境而不是启动机器人外,SLAM模拟与实际TurtleBot3的SLAM相当相似。
下面的说明需要前面章节的前提条件,所以请先查看Simulation部分。
6.2.1 加载运行仿真环境
准备了三个Gazebo环境,但对于用SLAM创建地图,建议使用TurtleBot3 World或TurtleBot3 House。
使用以下指令之一来加载Gazebo环境。
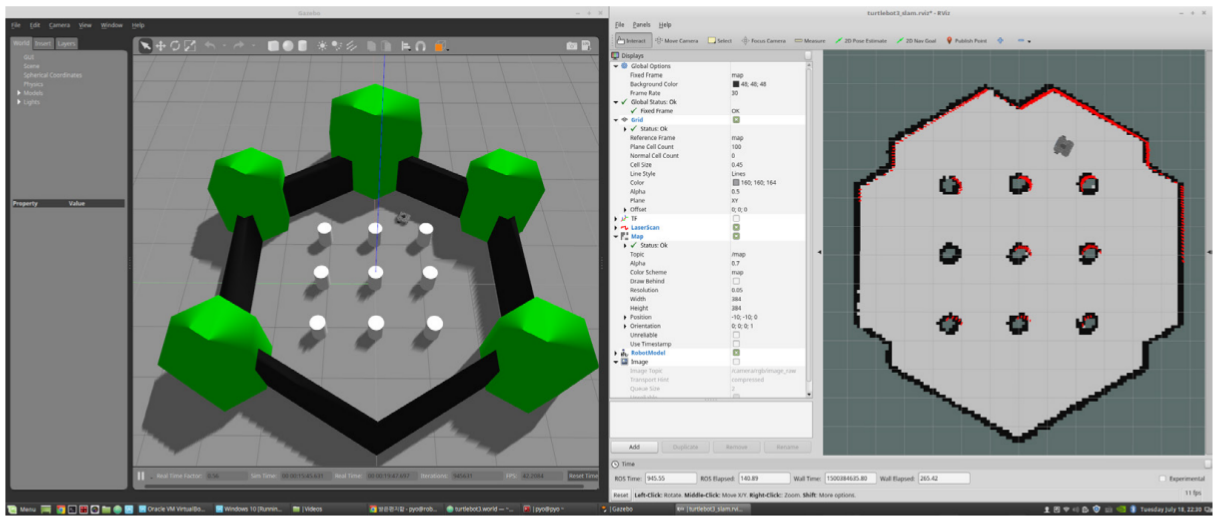
在本指令中,将使用TurtleBot3 World。
请在 TURTLEBOT3_MODEL 参数中使用 burger、waffle、waffle_pi 中适当的关键字。
1 | $ export TURTLEBOT3_MODEL=burger |
 Read more about How to load TurtleBot3 House
Read more about How to load TurtleBot3 House
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_gazebo turtlebot3_house.launch
6.2.2 运行 SLAM 节点
用Ctrl+Alt+T从远程电脑打开一个新的终端,运行SLAM节点。默认使用Gmapping SLAM方法。
请在TURTLEBOT3_MODEL参数中使用burger、waffle、waffle_pi中适当的关键词。
1 | $ export TURTLEBOT3_MODEL=burger |
6.2.3 运行 Teleoperation 节点
用Ctrl+Alt+T从远程电脑上打开一个新的终端,从远程电脑上运行远程操作节点。
请在 TURTLEBOT3_MODEL 参数中使用适当的关键字burger,waffle,waffle_pi。
1 | $ export TURTLEBOT3_MODEL=burger |
6.2.4 保存地图
当地图创建成功后,用Ctrl+Alt+T从远程电脑上打开一个新终端,并保存地图。
1 | $ rosrun map_server map_saver -f ~/map |
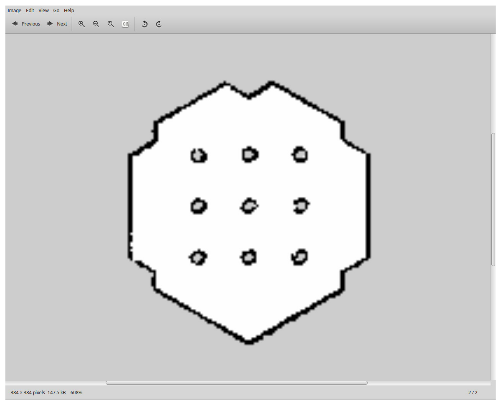
保存 map.pgm 文件
Read more about How to SLAM with multiple TurtleBot3
In order to create a map with multiple robots, multirobot-map-merge package is required.
Follow the instructions below instead of Launching Simulation World section of this page to operate multiple TurtleBot3.
- Install necessary package
$ sudo apt-get install ros-kinetic-multirobot-map-merge - Load multiple TurtleBot3 in TurtleBot3 House.
These loaded turtlebot3s are set initial position and orientation.$ roslaunch turtlebot3_gazebo multi_turtlebot3.launch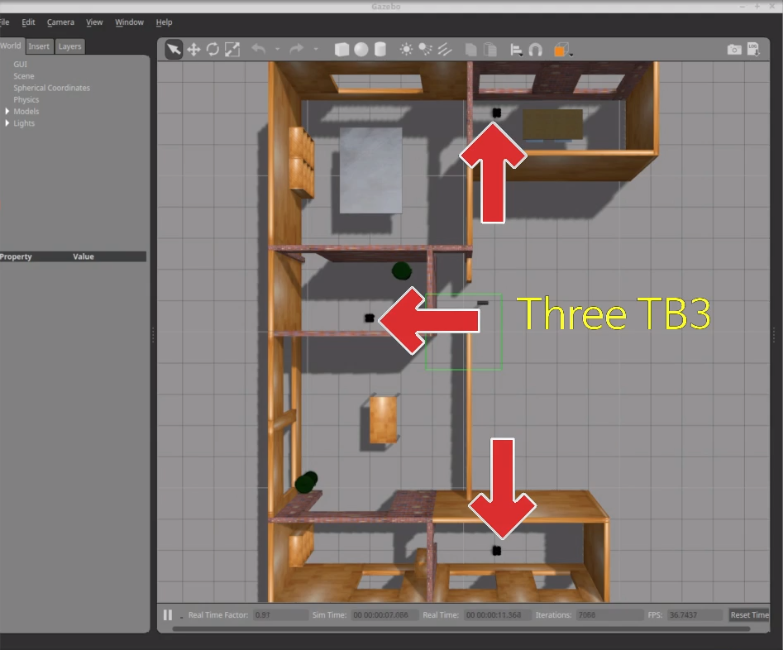
- Launch SLAM for each TurtleBot3
$ ROS_NAMESPACE=tb3_0 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_base_frame:=tb3_0/base_footprint set_odom_frame:=tb3_0/odom set_map_frame:=tb3_0/map $ ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_base_frame:=tb3_1/base_footprint set_odom_frame:=tb3_1/odom set_map_frame:=tb3_1/map $ ROS_NAMESPACE=tb3_2 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_base_frame:=tb3_2/base_footprint set_odom_frame:=tb3_2/odom set_map_frame:=tb3_2/map - Merge map data from each TurtleBot3
$ roslaunch turtlebot3_gazebo multi_map_merge.launch - Launch RViz
$ rosrun rviz rviz -d `rospack find turtlebot3_gazebo`/rviz/multi_turtlebot3_slam.rviz - Operate each TurtleBot3
$ ROS_NAMESPACE=tb3_0 rosrun turtlebot3_teleop turtlebot3_teleop_key $ ROS_NAMESPACE=tb3_1 rosrun turtlebot3_teleop turtlebot3_teleop_key $ ROS_NAMESPACE=tb3_2 rosrun turtlebot3_teleop turtlebot3_teleop_key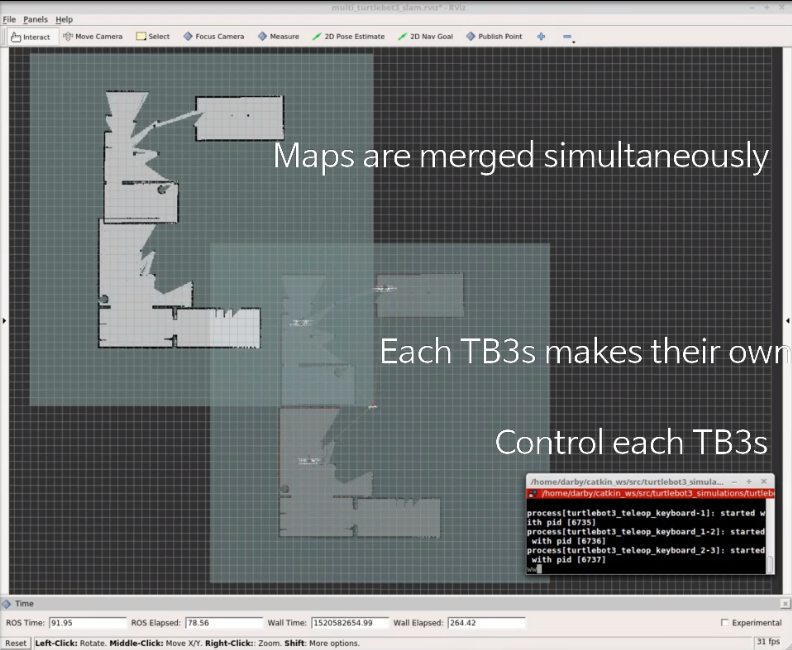
- Save the Map
$ rosrun map_server map_saver -f ~/map