
世界上最受欢迎的ROS平台
TurtleBot是最受欢迎的教育和研究用开源机器人。新一代TurtleBot3是一个小型的、低成本的、完全可编程的、基于ROS的移动机器人。它旨在用于教育、研究、业余爱好和产品原型设计。
负担得起的成本
TurtleBot的开发是为了满足学校、实验室和公司的成本意识需求。TurtleBot3是配备了360°激光测距传感器LDS-01的SLAM移动机器人中最实惠的机器人。
小尺寸
TurtleBot3汉堡的尺寸仅为138mm x 178mm x 192mm(长x宽x高)。其尺寸约为前代产品的1/4。想象一下,把TurtleBot3放在你的背包里,在任何地方开发你的程序和测试它。
ROS标准
TurtleBot品牌由Open Robotics管理,该公司开发和维护ROS。如今,ROS已经成为全世界所有机器人专家的首选平台。TurtleBot可以与现有的基于ROS的机器人组件集成,但对于想开始学习ROS的人来说,TurtleBot3可以成为一个负担得起的平台。
可扩展性
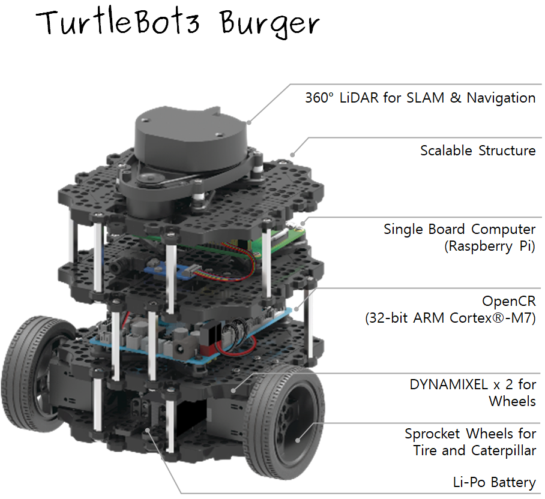
TurtleBot3鼓励用户用一些备选方案来定制其机械结构:开源嵌入式板(作为控制板)、计算机和传感器。TurtleBot3 Burger是一个两轮差速驱动型平台,但它在结构和机械上能够以多种方式进行定制。汽车、自行车、拖车等等。用各种SBC、传感器和电机在一个可扩展的结构上扩展你的想法,超出想象。
移动机器人的模块化执行器
TurtleBot3通过在车轮关节处使用2个DYNAMIXEL,能够获得精确的空间数据。DYNAMIXEL XM系列可通过6种操作模式之一进行操作(XL系列:4种操作模式)。轮子的速度控制模式、扭矩控制模式或关节的位置控制模式等。DYNAMIXEL甚至可以用来制造一个移动机械手,它很轻,但可以通过速度、扭矩和位置控制进行精确控制。DYNAMIXEL是使TurtleBot3完美的核心部件。它很容易组装、维护、更换和重新配置。
用于ROS的开放式控制板
控制板在硬件上和软件上都是开源的,用于ROS通信。开源控制板OpenCR1.0功能强大,不仅可以控制DYNAMIXEL,还可以控制ROBOTIS的传感器,这些传感器经常被用于基本的识别任务,具有成本效益。各种传感器,如触摸传感器、红外传感器、颜色传感器等都可以使用。OpenCR1.0板内有一个IMU传感器,因此它可以为无数的应用加强精确控制。该板有3.3V、5V、12V电源,以加强可用的计算机设备阵容。
强大的传感器阵容
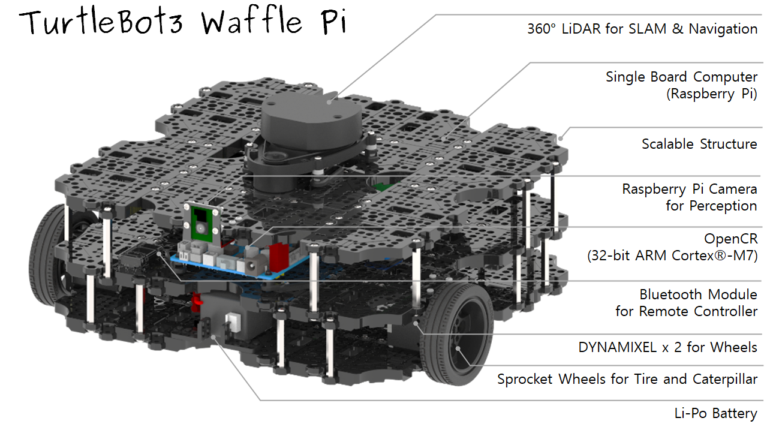
TurtleBot3 Burger使用增强的360° LiDAR、9轴惯性测量单元和精确的编码器,为您的研究和开发服务。TurtleBot3 Waffle也配备了相同的360°激光雷达,但另外提出了强大的Intel® RealSense™与识别SDK。TurtleBot3 Waffle Pi使用高利用率的Raspberry Pi相机。这将是制作移动机器人的最佳硬件解决方案。
开放源代码
TurtleBot3的硬件、固件和软件是开源的,这意味着欢迎用户下载、修改和分享源代码。TurtleBot3的所有部件都是用注塑塑料制造的,以实现低成本,然而,3D CAD数据也可用于3D打印。
三维CAD数据是通过Onshape发布的,这是一个全云的三维CAD编辑器。用户可以通过桌面电脑、笔记本电脑甚至便携式设备上的网络浏览器获得访问。Onshape允许绘制3D模型,并与同事们一起组装它们。此外,对于想自己制作OpenCR1.0板的用户来说,OpenCR1.0板的所有细节,如原理图、PCBgerber文件、BOM和固件源代码都在开源许可证下向用户和ROS社区完全开放。你可以修改下载的源代码和硬件,与你的朋友分享。
2.1 规格
2.1.1 硬件规格
| Items | Burger | Waffle Pi |
|---|---|---|
| Maximum translational velocity | 0.22 m/s | 0.26 m/s |
| Maximum rotational velocity | 2.84 rad/s (162.72 deg/s) | 1.82 rad/s (104.27 deg/s) |
| Maximum payload | 15kg | 30kg |
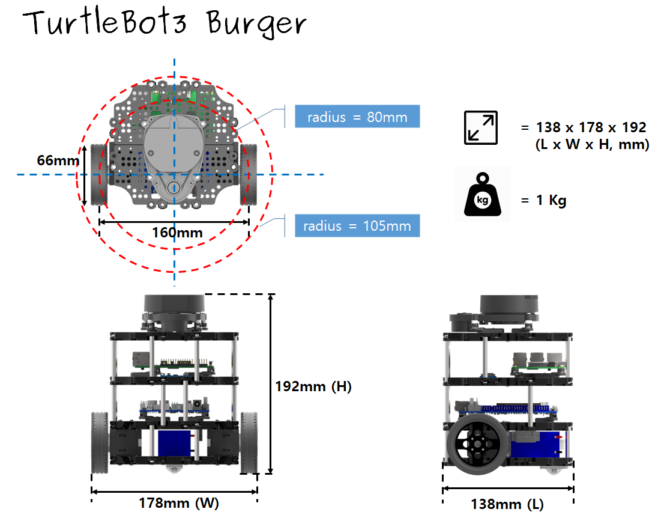
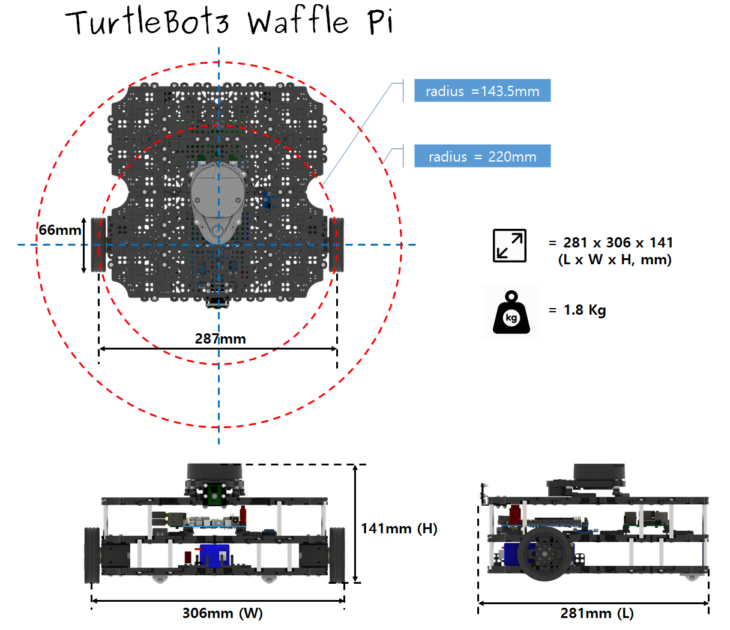
| Size (L x W x H) | 138mm x 178mm x 192mm | 281mm x 306mm x 141mm |
| Weight (+ SBC + Battery + Sensors) | 1kg | 1.8kg |
| Threshold of climbing | 10 mm or lower | 10 mm or lower |
| Expected operating time | 2h 30m | 2h |
| Expected charging time | 2h 30m | 2h 30m |
| SBC (Single Board Computers) | Raspberry Pi | Raspberry Pi |
| MCU | 32-bit ARM Cortex®-M7 with FPU (216 MHz, 462 DMIPS) | 32-bit ARM Cortex®-M7 with FPU (216 MHz, 462 DMIPS) |
| Remote Controller | - | RC-100B + BT-410 Set (Bluetooth 4, BLE) |
| Actuator | XL430-W250 | XM430-W210 |
| LDS(Laser Distance Sensor) | 360 Laser Distance Sensor LDS-01 or LDS-02 | 360 Laser Distance Sensor LDS-01 or LDS-02 |
| Camera | - | Raspberry Pi Camera Module v2.1 |
| IMU | Gyroscope 3 Axis Accelerometer 3 Axis | Gyroscope 3 Axis Accelerometer 3 Axis |
| Power connectors | 3.3V / 800mA 5V / 4A 12V / 1A | 3.3V / 800mA 5V / 4A 12V / 1A |
| Expansion pins | GPIO 18 pins Arduino 32 pin | GPIO 18 pins Arduino 32 pin |
| Peripheral | UART x3, CAN x1, SPI x1, I2C x1, ADC x5, 5pin OLLO x4 | UART x3, CAN x1, SPI x1, I2C x1, ADC x5, 5pin OLLO x4 |
| DYNAMIXEL ports | RS485 x 3, TTL x 3 | RS485 x 3, TTL x 3 |
| Audio | Several programmable beep sequences | Several programmable beep sequences |
| Programmable LEDs | User LED x 4 | User LED x 4 |
| Status LEDs | Board status LED x 1 Arduino LED x 1 Power LED x 1 | Board status LED x 1 Arduino LED x 1 Power LED x 1 |
| Buttons and Switches | Push buttons x 2, Reset button x 1, Dip switch x 2 | Push buttons x 2, Reset button x 1, Dip switch x 2 |
| Battery | Lithium polymer 11.1V 1800mAh / 19.98Wh 5C | Lithium polymer 11.1V 1800mAh / 19.98Wh 5C |
| PC connection | USB | USB |
| Firmware upgrade | via USB / via JTAG | via USB / via JTAG |
| Power adapter (SMPS) | Input : 100-240V, AC 50/60Hz, 1.5A @max Output : 12V DC, 5A | Input : 100-240V, AC 50/60Hz, 1.5A @max Output : 12V DC, 5A |
2.1.2 尺寸和质量
TurtleBot3 Burger数据
TurtleBot3 Waffle Pi 数据
2.2 组成部分
2.2.1 配件清单
TurtleBot3有两种类型的模型。Burger “和 “Waffle Pi”。
下表显示了组件的清单。两种型号之间的主要区别是执行器、SBC(单板计算机)和传感器。
| Part Name | Burger | Waffle Pi | |
|---|---|---|---|
| Chassis Parts | Waffle Plate | 8 | 24 |
| . | Plate Support M3x35mm | 4 | 12 |
| . | Plate Support M3x45mm | 10 | 10 |
| . | PCB Support | 12 | 12 |
| . | Wheel | 2 | 2 |
| . | Tire | 2 | 2 |
| . | Ball Caster | 1 | 2 |
| . | Camera Bracket | 0 | 1 |
| Motors | DYNAMIXEL (XL430-W250-T) | 2 | 0 |
| . | DYNAMIXEL (XM430-W210-T) | 0 | 2 |
| Boards | OpenCR1.0 | 1 | 1 |
| . | *Raspberry Pi | 1 | 1 |
| . | USB2LDS | 1 | 1 |
| Remote Controllers | BT-410 Set (Bluetooth 4, BLE) | 0 | 1 |
| . | RC-100B (Remote Controller) | 0 | 1 |
| Sensors | **LDS-01 or LDS-02 | 1 | 1 |
| . | Raspberry Pi Camera v2.1 | 0 | 1 |
| Memorys | MicroSD Card | 1 | 1 |
| Cables | Raspberry Pi Power Cable | 1 | 1 |
| . | Li-Po Battery Extension Cable | 1 | 1 |
| . | DYNAMIXEL to OpenCR Cable | 2 | 2 |
| . | USB Cable | 2 | 2 |
| . | Camera Cable | 0 | 1 |
| Powers | SMPS 12V5A | 1 | 1 |
| . | A/C Cord | 1 | 1 |
| . | LIPO Battery 11.1V 1,800mAh | 1 | 1 |
| . | LIPO Battery Charger | 1 | 1 |
| Tools | Screw driver | 1 | 1 |
| . | Rivet tool | 1 | 1 |
| Miscellaneous | PH_M2x4mm_K | 8 | 8 |
| . | PH_T2x6mm_K | 4 | 8 |
| . | PH_M2x12mm_K | 0 | 4 |
| . | PH_M2.5x8mm_K | 16 | 16 |
| . | PH_M2.5x12mm_K | 0 | 20 |
| . | PH_T2.6x12mm_K | 16 | 0 |
| . | PH_M2.5x16mm_K | 4 | 4 |
| . | PH_M3x8mm_K | 44 | 140 |
| . | NUT_M2 | 0 | 4 |
| . | NUT_M2.5 | 20 | 24 |
| . | NUT_M3 | 16 | 96 |
| . | Rivet_1 | 14 | 22 |
| . | Rivet_2 | 2 | 2 |
| . | Spacer | 4 | 4 |
| . | Silicone Spacer | 0 | 4 |
| . | Bracket | 5 | 6 |
| . | Adapter Plate | 1 | 1 |
- Raspberry Pi 3 Model B+自2019年起应用。更早的型号配备了Raspberry Pi 3 Model B。
- Raspberry Pi 4 Model B自2021年9月起应用。
- LDS-02自2022年起应用。
由于Intel® Joule™ 570x的终止使用,TurtleBot3 Waffle已经停产,可以选购TurtleBot3 Waffle Pi替代
2.2.2 开源硬件
Turtlebot3的核心部件有以下几个。底盘、马达、车轮、OpenCR、SBC、传感器和电池。底盘是华夫饼板,用于容纳其他部件。华夫饼板作为底盘起着重要的作用,尽管它的大小和你的手掌一样小。华夫饼板是用注塑法制造的,以降低制造成本。然而,用于3D打印的华夫饼板的CAD数据也可以通过Onshape获得。Turtlebot3 Burger是一个双轮差速驱动型平台,但它在结构上和机械上有很多可定制的地方。赛格威、坦克、自行车、拖车等等。
CAD数据被发布到Onshape,它是一个全云的3D CAD编辑器。通过网络浏览器从你的PC或便携式设备上获取访问。Onshape允许与同事们一起绘制和组装零件。